
ID : 947
Modifying Software Motion Limits
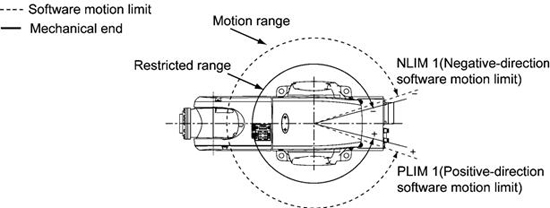
A limit to the operation range of the robot defined by the software is called a software motion limit. Software motion limits become valid after CAL of the robot has been completed and the robot has entered the range set by the limits.
A mechanical operation limit is called a mechanical end and set by a mechanical stop. To prevent the robot from striking against a mechanical stop, each software motion limit is set slightly in front of the mechanical end as shown in the figure below. Although there is no mechanical stop for the 6th axis, a software motion limit is set.
If the robot reaches a software motion limit during manual or automatic operation, an error message will be displayed and the robot will come to a stop. The power to the motor is also turned OFF in such a case during automatic operation.
All axes are assigned a software motion limit in both the positive and negative direction of the operation range. The software motion limit in the positive direction is called the positive-direction software motion limit and that in the negative direction is called the negative-direction software motion limit.
Software motion limits are not functions in accordance with safety standards.
 |
ID : 947