
ID : 975
CALSET
What Is CALSET?
Calibrating the relationship between position information recognized by the robot controller and the actual position of the robot arm is called CALSET.
CALSET uses a previously determined axis position where an axis can be secured. It creates calibration data (CALSET data) that matches the actual axis position (CALSET position) with the encoder value. The angle of the CALSET position is saved in the robot controller as a RANG value.
The CALSET data is different on each robot.
CALSET work must be performed when any of the motors is replaced or the encoder backup battery goes dead and the position-related data retained in the encoder is lost.
In CALSET work, there are "CALSET" and "Recover CALSET data".
If a motor is changed, execute "CALSET"; and in other cases, execute "Recover CALSET data".
CALSET data should be managed by the customer. Back up the CALSET data periodically, referring to "Backing up Projects ".
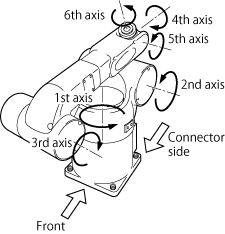
Factory Defaults of CALSET Position
| Axis | CALSET position |
|---|---|
| 1st axis | Turning end in the positive direction (counterclockwise end when viewed from top) |
| 2nd axis | Turning end in the negative direction |
| 3rd axis | Turning end in the positive direction |
| 4th axis | Models having no mechanical stop on the 4th axis Turning end in the positive direction, which is set by a CALSET jig. (counterclockwise end when viewed from the arm end) |
| 5th axis | Turning end in the positive direction (upward end of the 5th-axis arm) |
| 6th axis | Turning end in the positive direction, which is set by a CALSET jig. |
VM-6083/VM-60B1
|
|
CALSET Procedure
1
Release the brake of an axis to be CALSET and move the axis to the CALSET position.
2
Use the teach pendant to select CALSET.
Refer to the "Displaying CALSET Operation Menu " of TEACH PENDANT OPERATION GUIDE.
ID : 975