
ID : 887
Mounting the CALSET Jig on the 4th Axis (which has no mechanical stop)
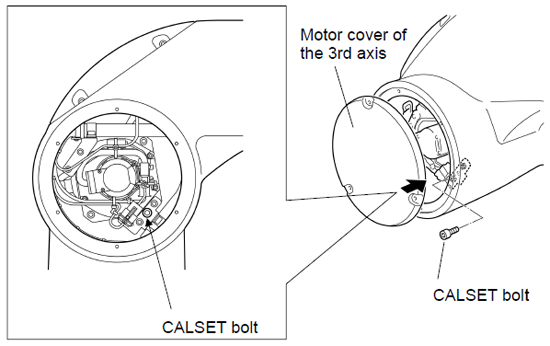
As a CALSET jig, a special bolt (CALSET bolt) is provided inside the 3rd-axis motor cover in the robot unit.
1
Remove the 3rd-axis motor cover and unscrew the CALSET bolt.
After CALSETing, be sure to set the bolt back into place and torque it to 1.0 Nm ±20%.
2
Rotate the second arm to the position specified in Step 4.
3
Release the brake of the 4th axis.
4
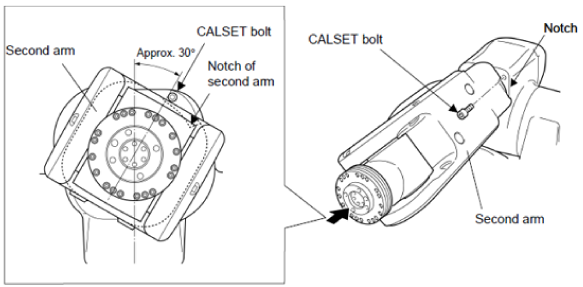
Set the CALSET bolt to the end of the 3rd axis housing as shown below.
Tightening torque of the CALSET bolt: 2.9 Nm ±20%
Be sure to use the CALSET bolt as a CALSET jig. Using any other bolt will result in a positional error in CALSET.
The CALSET position of the 4th axis refers to the point where the notch of the second arm comes into contact with the head of the CALSET bolt by turning the second arm.
ID : 887