
ID : 5170
Non-Force Sensor-Based Force Control Function
The following force control function does not use a force sensor.
This function is not a safety function that reduces a force applied when the robot collides with or contact a person.
Compliance Function
This function provides compliance control, to allow flexible control over the robot movement under situations where external force is exerted on the robot and attached tools.
This function is available for the following robot types.
| Type | Robot series |
|---|---|
| 6-axis robot | VM, VS, VS-6556/6577, VP |
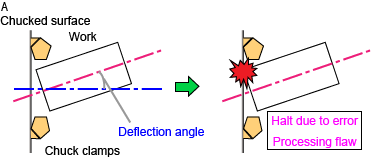
During tasks that involve pushing of parts against one another or contact with target objects such as fittings, misalignment between the actual position and target position of the robot arm tip may occur. If Compliance Function is not used in these cases, the robot arm will keep moving towards the target position, causing an error that may power off the motor or even damage the work (refer to A below).
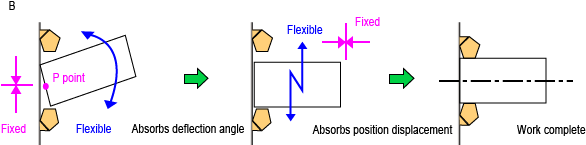
Enabling Compliance Function in the above cases will absorb any position displacement, and thus prevent errors and damage that may arise (refer to B below).
ID : 5170