
ID : 5440
2nd-axis Mechanical Ends Change
At the time of delivery from the factory, mechanical ends are preset so that the workable angle of the 2nd-axis will be as listed in the table below (factory default).
The limit to the workable angle of the robot is defined by the software motion limit. The software motion limit is set inside the mechanical end positions.
Workable angle at shipping for VS-6556/6577 series
| Model | Workable angle for the 2nd-axis |
|---|---|
| VS-6556 series | +135°, -100° |
| VS-6577 series | +135°, -100° |
Changing the mechanical ends of the 2nd-axis by adding mechanical stoppers is called a mechanical end change.
To change the mechanical ends of the 2nd-axis, the mechanical stoppers should be prepared by the customer.
After changing the mechanical ends, change the software motion limits to the positions inside the mechanical end positions.
And also, if you change the RANG values required after a mechanical end change, the CALSET must also be performed.
RANG refers to a reference angle that determines the relationship between the reference position of the robot and the mechanical ends, and is also called a ready angle.
- When CALSET is necessary (e.g., at the time of motor replacement), if you perform CALSET after removing the mechanical stop parts (prepared by the customer), a mechanical end change requires no RANG value change or CALSET.
-
If you perform CALSET with the mechanical stop parts (prepared by the customer) being mounted, a mechanical end change requires RANG value change and CALSET. In this case, the position repeatability depends on the mechanical stop parts prepared by the customer.
The customer needs to manage the RANG values and CALSET values after modification, referring to "Backing up Projects."
The following examples for the 2nd-axis mechanical end changes do not involve the RANG value change or CALSET.
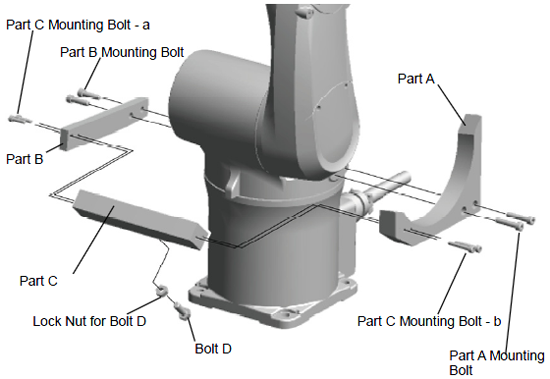
Outline
Install the parts shown below on the robot body to change the 2nd-axis mechanical end.
ID : 5440
- Related Information
- Reference Drawing of 2nd-axis