
ID : 5638
Appendixes
This page contains a description of other points to consider about the transfer robot.
About CP Operation
The linear unit supports the CP operation whereas the transfer robot does not.
Specifically, the transfer robot does not support:
- Selection of X-Y mode and TOOL mode as the operation mode on the teach pendant (Only Joint mode is selectable).
- Selection of either P or T type variable in the variable shift on the teach pendant (For J type variable shift, only the PTP operation is selectable),
- Declaration statements related to the tool, workpiece, and area functions such as TOOL, or
- CP operations (L, C, and S) as the interpolation method or P or T type variable in the specified coordinates when specifying a robot control statement such as MOVE.
About Arm 3D View
Since the Arm 3D View of the transfer robot is designed simply, it does not cover cableveyors, etc.. Therefore, interference check is not supported. Use this tool for operation check. Note that the L-axis stroke length is set to the default value. Change the value depending on your needs.
- Default value of the L-axis stroke length
| Axis | Default stroke |
|---|---|
| L axis | 1,000 mm |
Changing stroke length of the L-axis
Select the model [L] from the Model tree. Check that "All" is selected in [Zoom] - [Scale]. Change the scale of X to any stroke length for the L-axis.
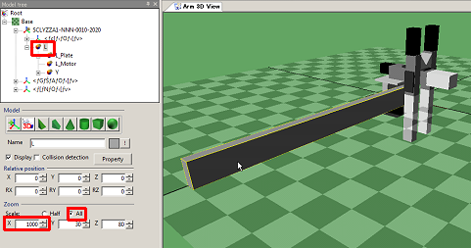
- Items to be set
| Model tree | Zoom | |
|---|---|---|
| Select [L] | Select "All" from the scaling factor | Change the scale of X to any stroke length for the L-axis. (mm) |
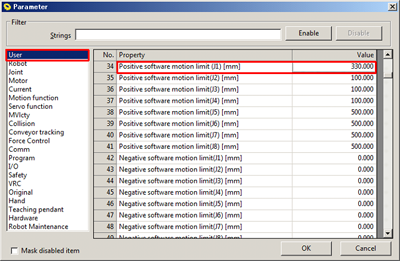
Changing L-axis softawre limit
From the [Project] menu, select [Parameter].

From the [Parameter] window, select [User], and then select [Positive software motion limit(J1)[mm]].
Enter a given value in the [Value] column.
This completes the change of the stroke length and the software limits.
ID : 5638