
ID : 5931
Operation details
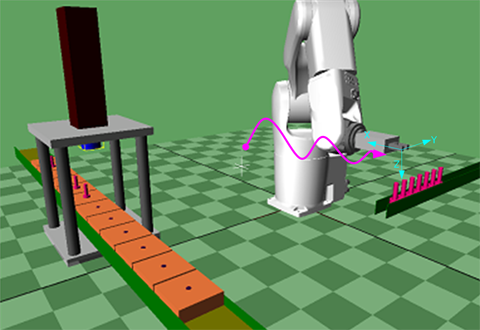
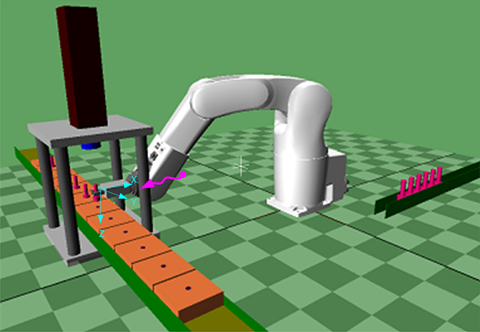
As the following figure shows, the robot holds a workpiece and then supports press-fitting process. By activating the compliance function at the press-fitting, the robot gives under the press-fitting direction.
1
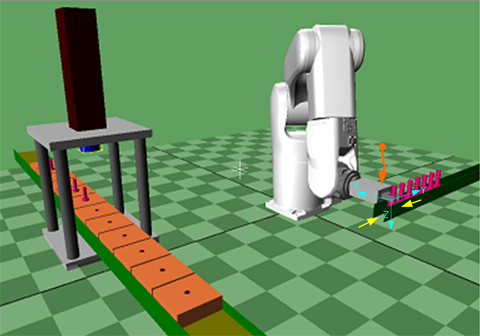
Set the tool coordinate to TOOL1, and then move to above the workpiece to pick (approach position of P1).
2
Approach the workpiece (P1) to hold.
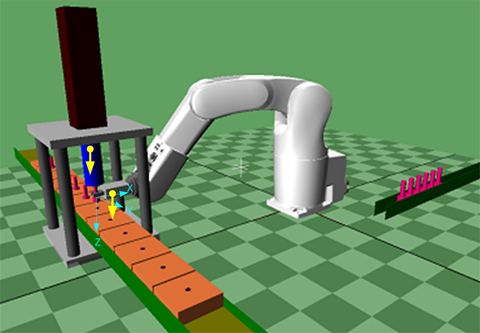
3
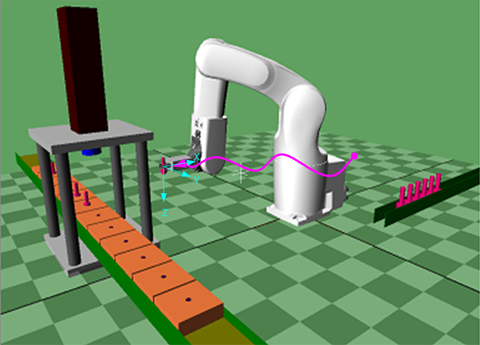
Move to above the workpiece (negative Z direction of the tool coordinate from P1).
4
Move to the position before the press-fitting (P2).
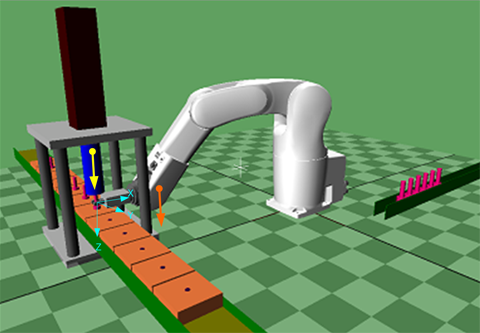
5
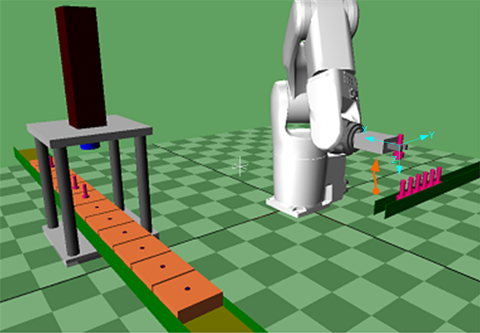
Move to above the press-fitting position (approach position of P3).
6
Move to the press-fitting position (P3), and then enable the compliance function.
Start the press-fitting machine.
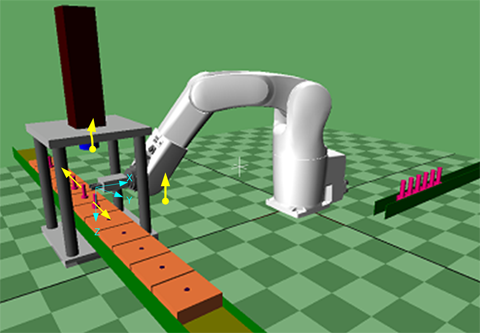
7
The press-fitting is started. The robot gives under the press-fitting direction because the compliance function is enabled.
8
After completion of the press-fitting, lift up the press-fitting machine, and then disable the compliance function.
Release the workpiece, and then move to above the press-fitting position (negative Z direction of tool coordinate of P3).
9
Move to the position before the press-fitting (P2).
ID : 5931