
ID : 7787
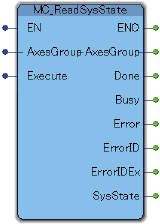
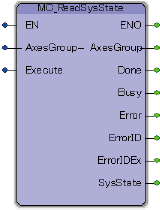
MC_ReadSysState
To return the controller status.
| Graphic expression | FB category | |
|---|---|---|
| Ver.5.5 | Ver.5.35 | |
 |
 |
Non motion |
Input and Output Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | No | ||
|
||||
Input Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| Execute | Boolean |
|
FALSE | No |
|
||||
(*) : For some Variable, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
|
| SysState | DWord |
|
Function Description
The following is the correspondence table between an obtained bit and the robot controller's state.
| Bit | Status |
|---|---|
| 0 | Robot in operation (program running) |
| 1 | Robot error |
| 2 | Servo On |
| 3 | Robot initialization complete (in I/O standard or MiniIO dedicated mode) / Robot power On complete (in I/O compatible mode) |
| 4 | Automatic mode |
| 5 | When an executable token is not set to the Teach Pendant in Auto Mode |
| 6 | Battery exhaustion warning |
| 7 | Robot warning |
| 10 | Emergency stop status |
| 11 | Automatic robot run enabled |
| 12 | Protective Stop |
| 18 | Manual mode or Teach check mode |
| 20 | Robot is running (command level) |
| 21 | Robot is running (encoder level) |
Attention
-
ID : 7787