
ID : 4107
Move to the Position Specified by Variable (only for J type, T type, and P type)
Operation path : [F3 Variable] - [F4 Move To]
Specify the variable number in the variables of J type, T type, and P type, and then manually move the robot to the registered coordinate value in the specified variable number.
Specify the variable number of the registered coordinate value, where robot moves to, and press [F4 Move To] to display the following [Move To] window.
Select if the robot should be moved to the target coordinate value by "PTP Movement" or "CP Movement (Linear)".
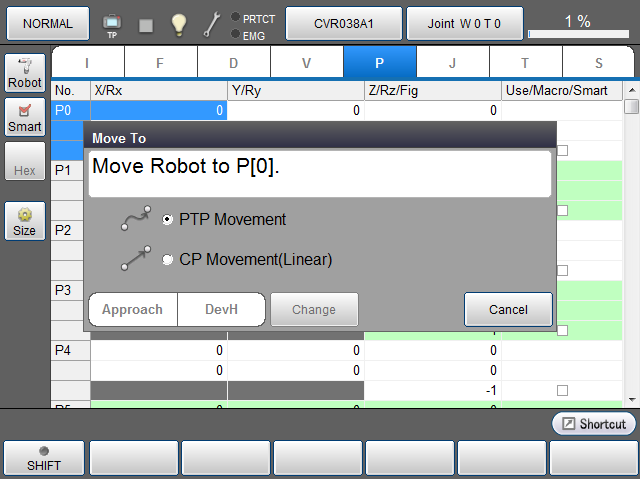
You can move the robot to the approach position or offset position as well.
Enter given approach distance and press OK. The robot will move to the position apart by the specified approach distance.
When you press "DevH", a dialog box appears. Enter given coordinate values (X, Y, Z, Rx, Ry, and Rz) and press OK. The robot will offset by specified distances from the position specified by variable.
If values of Approach distance or DevH (coordinate values of X, Y, Z, Rx, Ry, and Rx) have been set, you can change these values by pressing [Change] button.
ID : 4107