
ID : 7277
Method by TP App
TP App allows you to perform the diagnosis motion and edit the setting items, such as a diagnosis motion angle.
This section describes the above information separately as follows:
Do not enter the motion area of robot during diagnosis motion. Robots may perform unexpected behavior.
How to Perform Diagnosis Motion
1
Select the following path to display the [Diagnosis] window.
|
Operation path : [F6 Setting] – [F10 COBOTTA] – [F2 Diagnosis] |
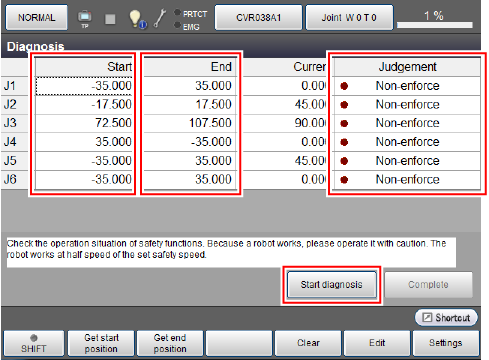
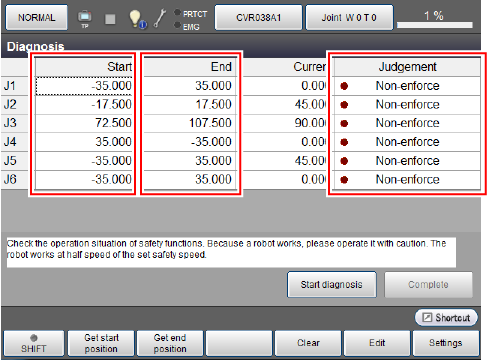
"Start" and "End" are set as positions where a motion angle is the diagnosis motion angle or larger. You can change the "Start" and "End" values. For how to change the values, refer to "Description of Setting Items" described later.
The "Judgement" field shows "Non-enforce" by default.
2
Tap the [Start diagnosis] button. A window appears to describe the operation method as shown in the figure below.
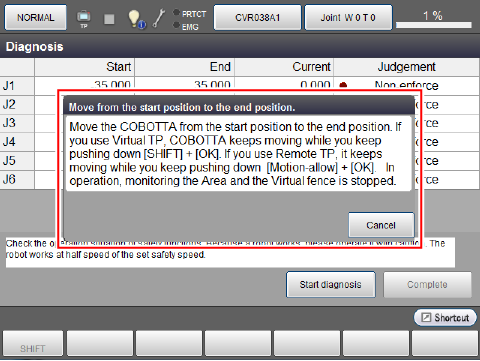
When you tap a specific button while this window is displayed, the diagnosis motion starts. The button you tap is different between Virtual TP and Remote TP. Refer to the figure below. The window describing the operation method also specifies the button you tap.
During diagnosis motion, a robot repeats subtle motion and turning ON/OFF of motors.
COBOTTA may emit sound of brake release at the motor ON/OFF though, this is normal. Wait until the diagnosis motion completes.
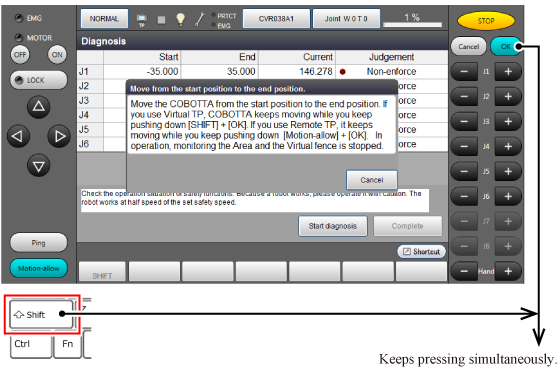
Virtual TP screenThe diagnosis motion runs while you keep pressing the Shift key on the keyboard and the [OK] button on Virtual TP simultaneously.
|
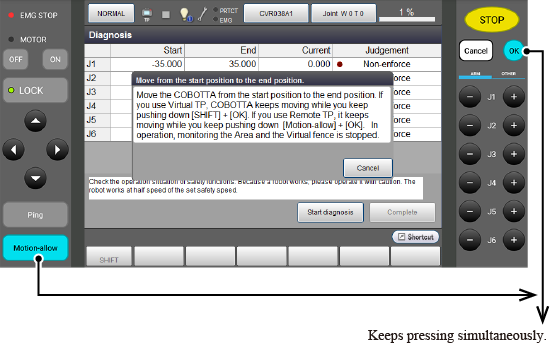
Remote TP screenThe diagnosis motion runs while you keep pressing the [Motion-allow] button and the [OK] button on Remote TP simultaneously.
|
3
When the diagnosis motion starts, each axis of COBOTTA moves to "Start" and then to "End." The motion speed at this time is half the maximum speed. You can change this speed (percentage against the maximum speed). Refer to "Setting Parameter" described later.
When the COBOTTA moves to the end position, the following completion message appears, so be sure to keep pressing the buttons until then. If you release either of the buttons, COBOTTA stops.
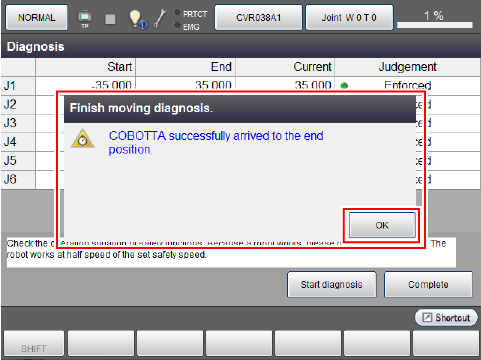
4
Tap the [OK] button on the completion message to close.
If the status of all axes in the "Judgement" field shows "Enforced" on the [Diagnosis] window, it indicates that the position detection function and the speed detection function of COBOTTA are normal.
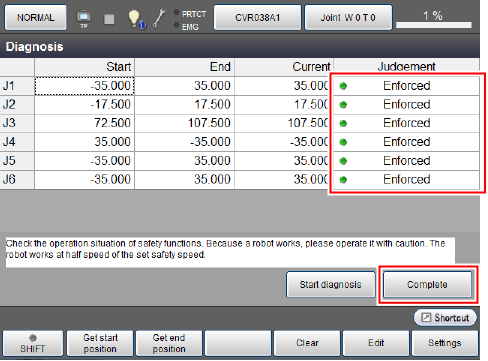
Tap the [Complete] button to close the [Diagnosis] window.
Now, the diagnosis motion has ended.
Description of Setting Items
By using the function keys on the [Diagnosis] window, you can change the "Start" or "End" values and set the parameter.
| Description of function keys | |
|---|---|
| [F1 Get start position] | Overwrite the current COBOTTA position as the start position of the diagnosis motion (for all axes from the 1st axis to 6th axis). |
| [F2 Get end position] | Overwrite the current COBOTTA position as the end position of the diagnosis motion (for all axes from the 1st axis to 6th axis). |
| [F4 Clear] | Change the status of all axes in the "Judgement" field to "Non-enforce". |
| [F5 Edit] | Edit the setting value when the cursor is in any axis of "Start" or "End". |
| [F6 Settings] | Open the setting window for the diagnosis motion parameter. Refer to "Setting Parameter" described later. |
After you change the "Start" or "End" values, the motion angle from "Start" to "End" is checked. If an axis with the motion angle smaller than the diagnosis motion angle exists, the following system message appears, showing the angle value of the axis in red. In this case, even if you perform the diagnosis motion, the status of "Judgement" field does not change to "Enforced".
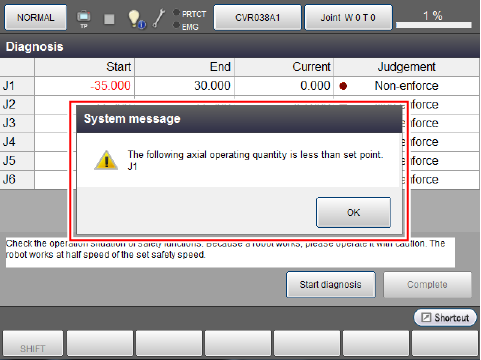
When you change the "Start" or "End" values, make sure that the motion angle is the following diagnosis motion angle or larger.
| Axis | Diagnosis motion angle |
|---|---|
| 1st axis | 70° |
| 2nd axis | 35° |
| 3rd axis | |
| 4th axis | 70° |
| 5th axis | |
| 6th axis |
Setting Parameter
When you tap [F6 Settings] on the [Diagnosis] window, the following [Diagnosis settings] window appears.
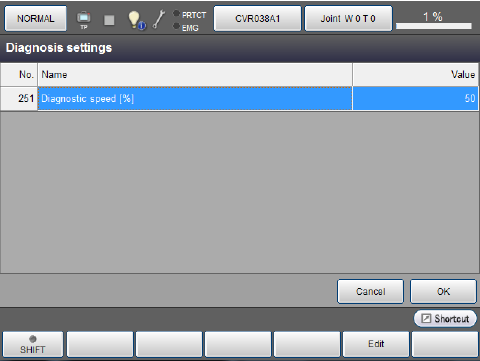
The description of the parameter is as follows:
| Setting Parameter | Value |
|---|---|
| 251 : Diagnostic speed [%] |
This is the motion speed of COBOTTA for the diagnosis motion. Set the percentage against the maximum speed. |
ID : 7277