
ID : 7279
Method by Robot Program
To perform the diagnosis motion using a robot program, use the PacScript command "DiagnosisMove". Other diagnosis motion-related PacScript commands are also available.
This section describes the above information separately as follows:
Do not enter the motion area of robot during diagnosis motion. Robots may perform unexpected behavior.
Motion Description of DiagnosisMove
When you execute "DiagnosisMove", COBOTTA moves so that the motion angle of each axis is the diagnosis motion angle or larger. You can check the specific target positions on TP App.
During diagnosis motion, a robot repeats subtle motion and turning on/off of motors.
COBOTTA may emit sound of brake release at the motor on/of though, this is normal. Wait until the diagnosis motion completes.
Select the following path on TP App to display the [Diagnosis] window.
|
Operation path : [F6 Setting] – [F10 COBOTTA] – [F2 Diagnosis] |
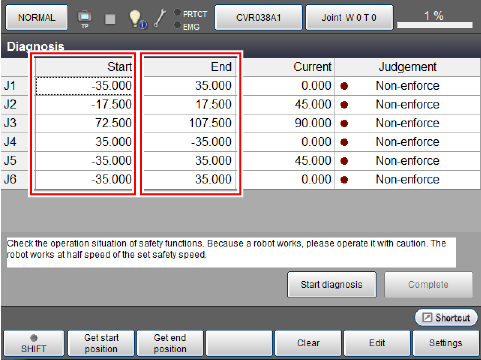
When you execute "DiagnosisMove", COBOTTA moves to the position (angle) set in "Start" and then to the position (angle) set in "End" on the [Diagnosis] window. The motion speed is half the maximum speed.
You can change the "Start" and "End" values and the motion speed. For how to change the values, refer to "Description of Setting Items" of "Method by TP App".
Example
The following shows an example of "DiagnosisMove". In this example, after the execution of "DiagnosisMove", the display message is set to change depending on the diagnosis motion results. "GetDiagnosisWarning" is used to determine the diagnosis motion results.
Sub Main 'Perform the diagnosis motionDiagnosisMove '===Change the message depending on the diagnosis motion results=== 'When the diagnosis motion ends successfullyIf GetDiagnosisWarning = 0 Then Msgbox "The position detection function and the speed detection function of COBOTTA are normal." 'When the diagnosis motion has an errorElse Msgbox "The position detection function or the speed detection function of COBOTTA are abnormal." End if '================================================ End Sub
- The "DiagnosisMove" command sets the diagnosis motion status (for all axes) to "Non-enforce" before performing the diagnosis motion.
- When the command is executed in simulation, it executes nothing and moves on to the next line.
Diagnosis Motion Command List
In addition to "DiagnosisMove", the command for diagnosis motion also includes some commands, such as "GetDiagnosisWarning" used in the above example.
The following table shows the list of diagnosis motion commands:
| Command (Reference) |
Function |
|---|---|
| DiagnosisMove |
To execute diagnosis motion. |
| ClearDiagnosisState |
To set the diagnosis status (for all axes) of diagnosis function to "Non-enforce". |
| GetDiagnosisPosition |
To obtain the start position or the end position of the diagnosis motion. |
| GetDiagnosisState |
This command obtains the diagnosis motion status (for all axes). |
| GetDiagnosisWarning |
This command obtains whether an axis with the diagnosis motion status set to "Non-enforce" exists or not. |
ID : 7279