
ID : 7951
Robot-in-operation (Output)
Function
This signal outputs to the external device that the robot is in operation.
Usage
The signal is used to light the robot operating indicator lamp of an external operating panel.
Since the signal is turned off when all programs stop, it outputs to external devices that all program stopped.
ON Conditions
The signal will be turned on during execution of the program and also while in the wait state with a condition branch or timer command.
However, this signal will not turn on while Supervisory tasks or TP panel tasks are running.
OFF Conditions
The signal will be turned off by one of the following operations.
- [STOP] button of Remote TP/Virtual TP is pressed.
- "Instantaneous stop (all tasks)" signal or "Step stop (all tasks)" signal is turned off.
- "External emergency stop input" signal or "Protective stop input" signal signal is turned off.
Timing Chart
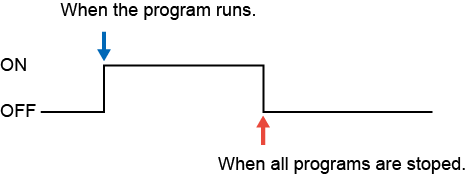
ID : 7951