
ID : 940
Transporting the Robot Unit
Before handling or installing the robot unit, be sure to read SAFETY PRECAUTIONS, "Installation Precautions 1 ".
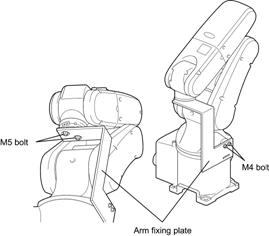
An arm fixing plate is used to secure the robot arms during transportation from the factory and should be removed after installation.
The robot unit should only be moved prior to installation if the arm fixing plate is in place.
The arm fixing plate should also be affixed if there is the possibility of great impact being applied to the robot unit during transportation. (See the table below for axes angles when affixing the arm fixing plate.) If the robot unit is subjected to significant impacts when the arm fixing plate is not in place, the arm angles may shift slightly and cause error to be displayed on the controller. Encoder resetting and CALSET must be performed if this occurs.
Robot Unit and Arm Angles When Packaged (When securing the arms with the arm fixing plate)
 |
Axis Angles When Affixing the Arm Fixing Plate (degrees)
| Axis | VP-6242 |
|---|---|
| J1 | -90.0000 |
| J2 | -40.0420 |
| J3 | 158.9266 |
| J4 | 0.0000 |
| J5 | 61.1154 |
| J6 | 0.0000 |
Release the brake for all axes after affixing the arm fixing plate to ensure that stress is not applied to the individual axes.
Handling the VP Robot Unit
The VP robot unit weighs approximately 15 kg (32 lbs), making it possible for the unit to be moved by one person. Always exercise the necessary level of care and attention when moving the robot unit.
 |
ID : 940