
ID : 1530
X-Y Mode (6-axis Robot)
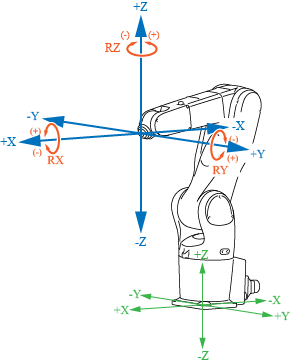
The X-Y mode allows user to drive the robot arm in base coordinates (whose origin is defined at the center of the robot basement). Pressing the X, Y, or Z key in the X-Y mode moves the robot flange linearly along the X, Y, or X axis, respectively, as shown below.
If work coordinates (whose origin is defined at a corner of the rectangular parallelepiped envelope of an object piece) is defined, then the robot flange moves linearly in the work coordinates.
If the RX, RY, or RZ key is used in the X-Y mode, the robot arm rotates on each axis of the virtual work coordinates defined on the center of the flange surface without changing the center position of the flange surface, as shown below.
|
In 5-axis robots, the flange can keep a constant posture (3-dimensional flange direction) only when it is accurately in parallel with the X-Y plane of the robot (RX and RY are 0 degree).
ID : 1530