
ID : 1558
Software Limit Setting
About Software Limits
A software limit refers to the limit of the robot's restricted space determined by the software. A software limit becomes effective when the robot enters a range determined by the software limit after the CALSET is completed.
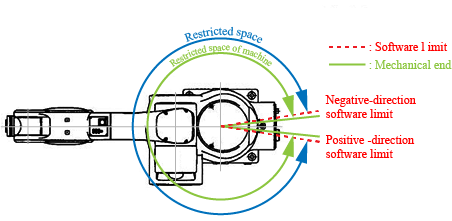
A mechanical end refers to a mechanical limit of motion and is set by a mechanical stopper. To prevent a collision with a mechanical stopper, a software limit is set just before the mechanical end. The sixth axis has no mechanical stopper but a software limit has been set.
When the robot reaches the software limit while it is manually or automatically running, it will stop with an error message displayed. In Auto mode, the motor is also turned off.
On all the axes, software limits have been set in the positive and negative directions of the restricted space. A software limit in the positive direction is called a positive-direction software limit; A software limit in the negative direction is called a negative-direction software limit.
Software Limits and Mechanical Ends
|
ID : 1558
- Related Information
- Examples of Changing Software Limits