
ID : 1989
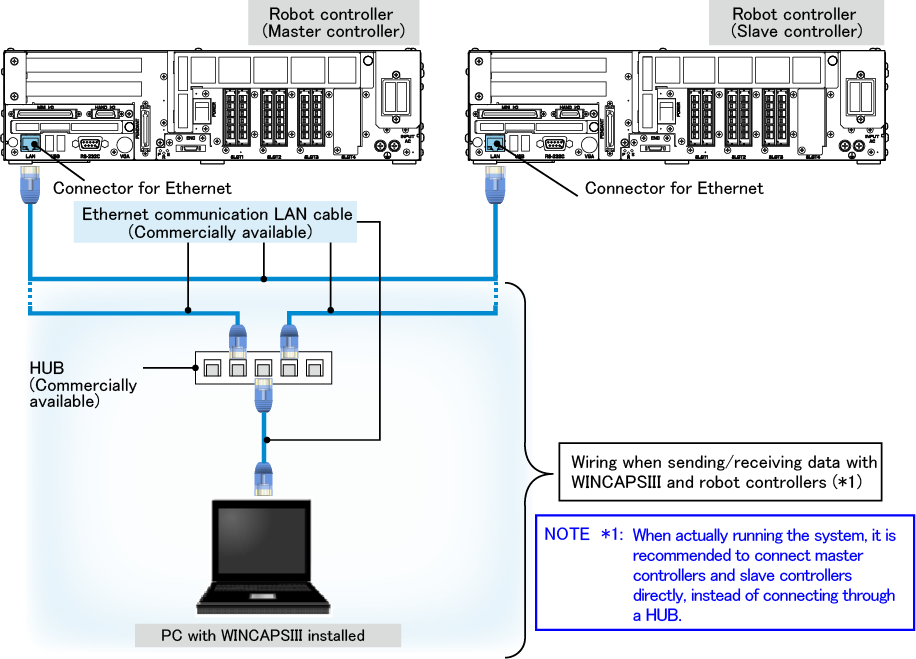
Wiring When Using Ethernet Only
When using Ethernet only, wiring between robot controllers is as shown below.
| HUB | The communication speed must be 1 Gbps or higher. If devices other than WINCAPSIII (PC) are connected to the HUB, confirm that the cooperative control function is not affected by the devices by using actual robots. The robot may stop due to an error, depending on the operation condition. Since the information of controlling interlocked robots is given priority in communication, other information (example: data sending/reception to/from WINCAPSIII) may have communication delay. |
|
|---|---|---|
| Ethernet communication LAN cable | Use a shielded LAN cable of category 6 or higher. Either a straight- or a cross-LAN cable can be used. The additional measures against noise, such as ferrite core and others, could be required depending on the condition. Please check your operation environment. |
|
| Software license | Master controller | It is a paid license. The part number is as follows.
|
| Slave controller | It is a free license. For the way of obtaining a license, refer to "Optional Function and License". |
|
| Wiring when sending/receiving data with WINCAPSIII and robot controllers | When the system for the cooperative control function is adjusted, data is sent/received between WINCAPSIII and a master controller, and also between WINCAPSIII and a slave controller as well. In this case, a PC with WINCAPSIII installed and the master and slave controllers must be all connected. Therefore, wire them as shown above. |
|
| Others | Field network is not available for the slave Controller. With WINCAPSIII, set the I/O allocation of the slave controller to "Mini I/O-dedicated mode". | |
ID : 1989