
ID : 3055
Circular Tracking
Overview
Circular tracking is a function to pick up a desired workpieces. First, the system obtains the coordinate of the target workpiece by means of sensor or visual device installed in the upstream of the turntable. Once the workpiece enters the robot arm's operation range, the robot picks it up by adjusting the robot arm in response to the workpiece's motion. This function is available from Ver.2.3.* or higher.
There are two types of circular tracking.
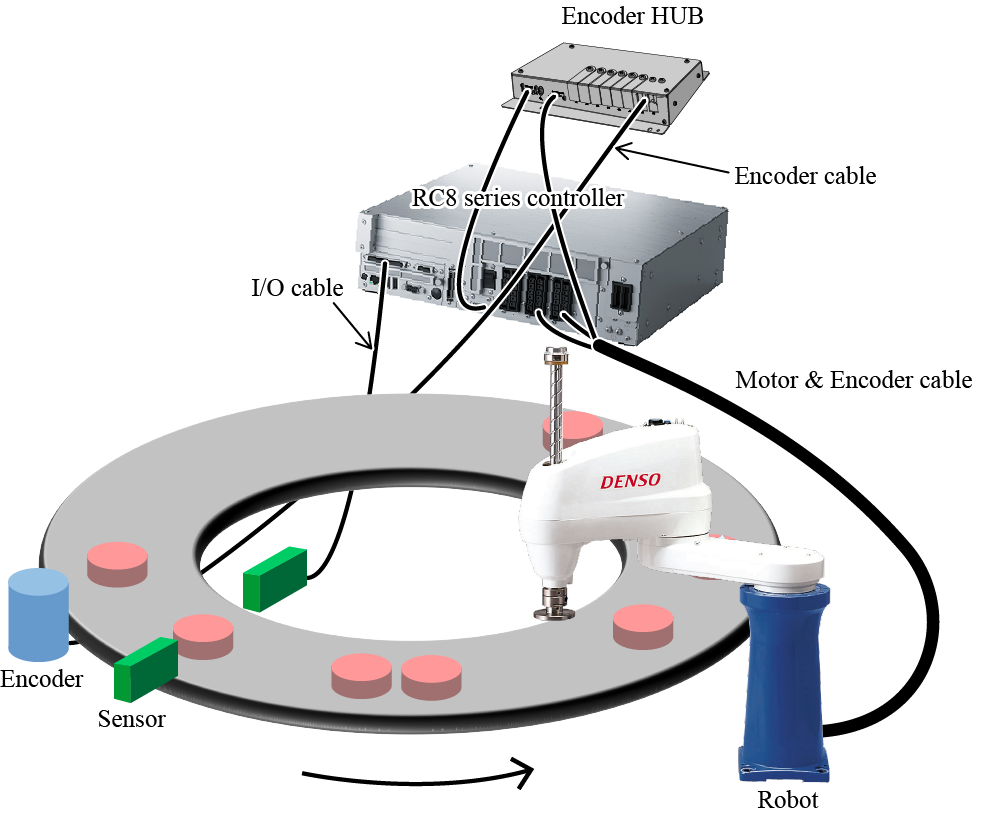
Sensor Tracking
Obtains the coordinate of the target workpiece by means of the photoelectronic sensor, then pick up the workpiece.
The sensor tracking system is applied to pick up workpieces which are placed in the same arc with arbitrary interval on the moving turntable.
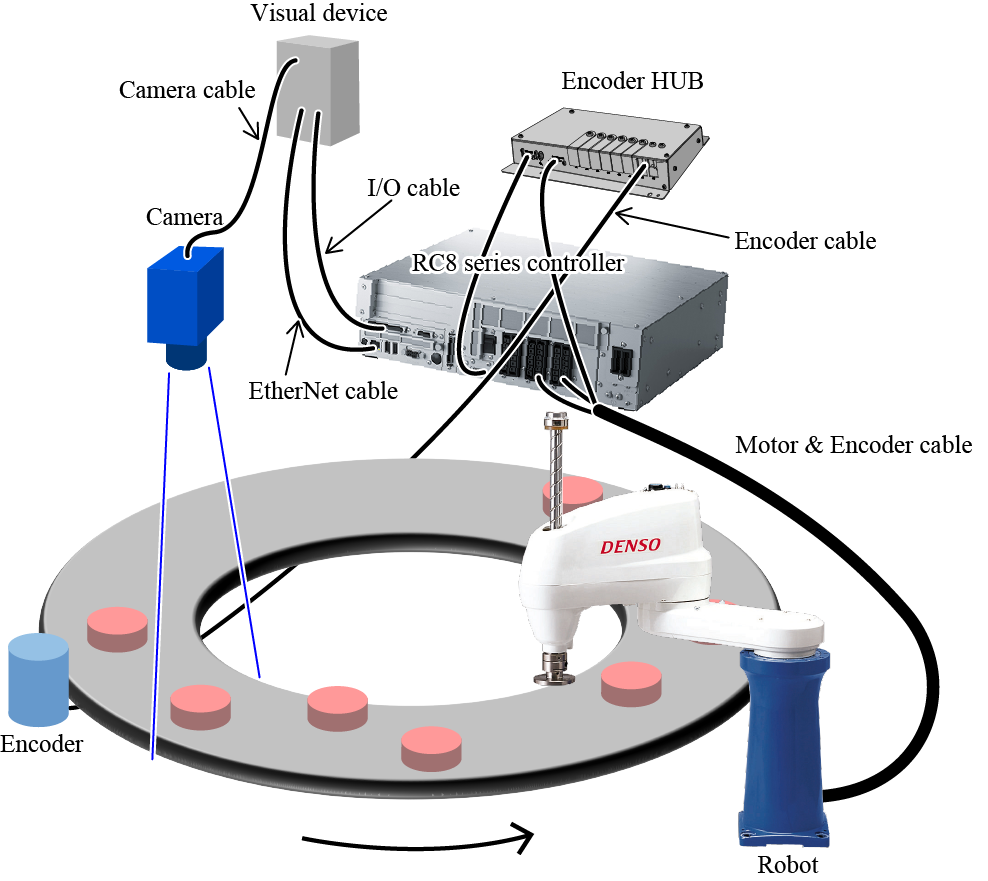
Vision Tracking
Obtains the coordinate of the target workpiece by means of the camera or visual device, then pick up the workpiece.
The vision tracking system is applied to pick up workpieces which are placed on arbitrary position and attitude on the moving turntable.
Details
For details, refer to the "CIRCULAR TRACKING MANUAL".
ID : 3055