
ID : 3314
Conditions for Using Force Sensor
The following shows the conditions for using force sensor.
Use of RS-422A Communication Board
To use the compliance function with force sensor, install an RS-422A communication board or an RS-422A micro converter into a robot controller.
Since the communication specification of the force sensor is RS-422A, the robot controller receives the information of force sensor via the board or the converter.
However, if both Ethernet and EtherCAT are used together for the communication between robot controllers, an RS-422A communication board cannot be installed in the master controller because both the EtherCAT master board and RS-422A communication board are the PCI boards.
To send the information of force sensor on the master controller-connected robot (hereafter, "Robot0") to the RS-422A communication board, install an RS-422A communication board into a slave controller.
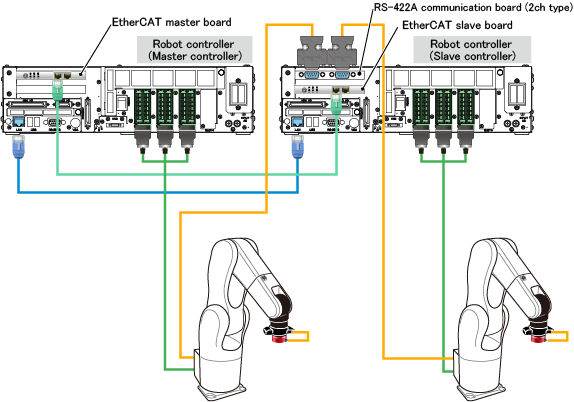
The following shows the wiring diagram for the application that Robot0 and Robot1 are linked for cooperation and each of them equips a force sensor.
In the following example, to read information from the force sensors in Robot0 and Robot1, an RS-422A communication board (2CH) is used.
For cooperation with three or more robots, install an RS-422A communication board (1CH, 2CH, or 4CH) in each slave controller, according to the number of force sensor to use.
The RS-422A communication board installed in the slave controller can be controlled from the master controller. For control method of RS-422A communication board, refer to"How to Use Force Sensor in Cooperative Control Function".
Use of RS-422A Micro Converter
Do not connect two RS-422A micro converters to one robot controller and use one of them for communication with a force sensor installed in another robot.
Make sure that one robot controller connects one RS-422A micro converter only.
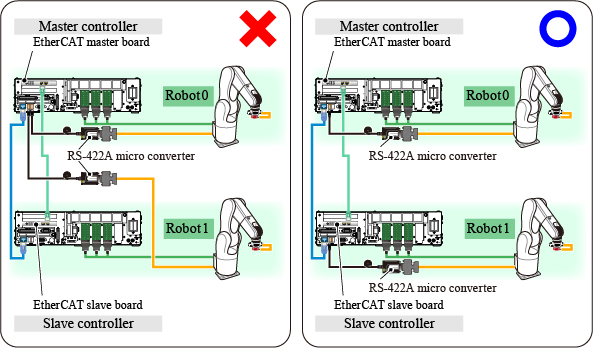
If three or more robots are linked for cooperation or the load of the controller becomes larger such as during multitasking, when you connect the force sensor to the master controller through the RS-422A micro converter, the communication timeout or the warning of packet error may occur. In that case, please install the RS-422A communication board into the slave controller and connect the force sensor.
The use of an RS-422A micro converter requires the configuration after the connection. Please refer to "How to Use Force Sensor in Cooperative Control Function".
About a License
For about the license of force sensor, you only need to prepare one for any robot controller.
If the license is installed in at least one robot controller, all robots can use the force sensor.
ID : 3314