
ID : 5222
Teaching to Position Variables
This section describes the method to teach robot the position variables P1 and P2 in manual mode.
Please be sure to backup your data when you edit programs or teach robot.
Teaching Robot Position (P1)
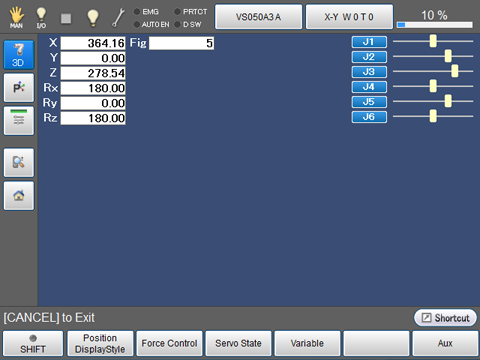
Press [F2 Arm] on the teach pendant to display information on each axis of the arm.
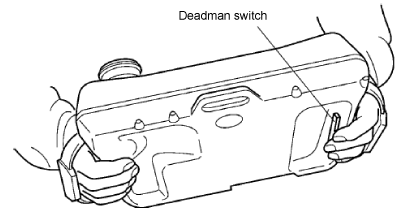
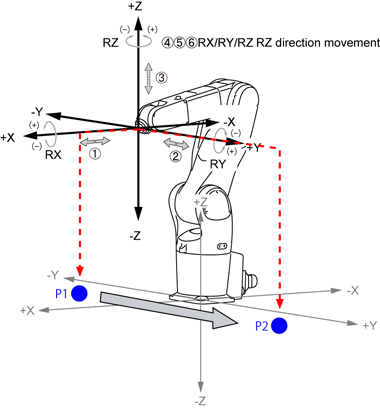
Press moving direction keys as required while pressing the deadman switch to move robot to the position to be set as P1.
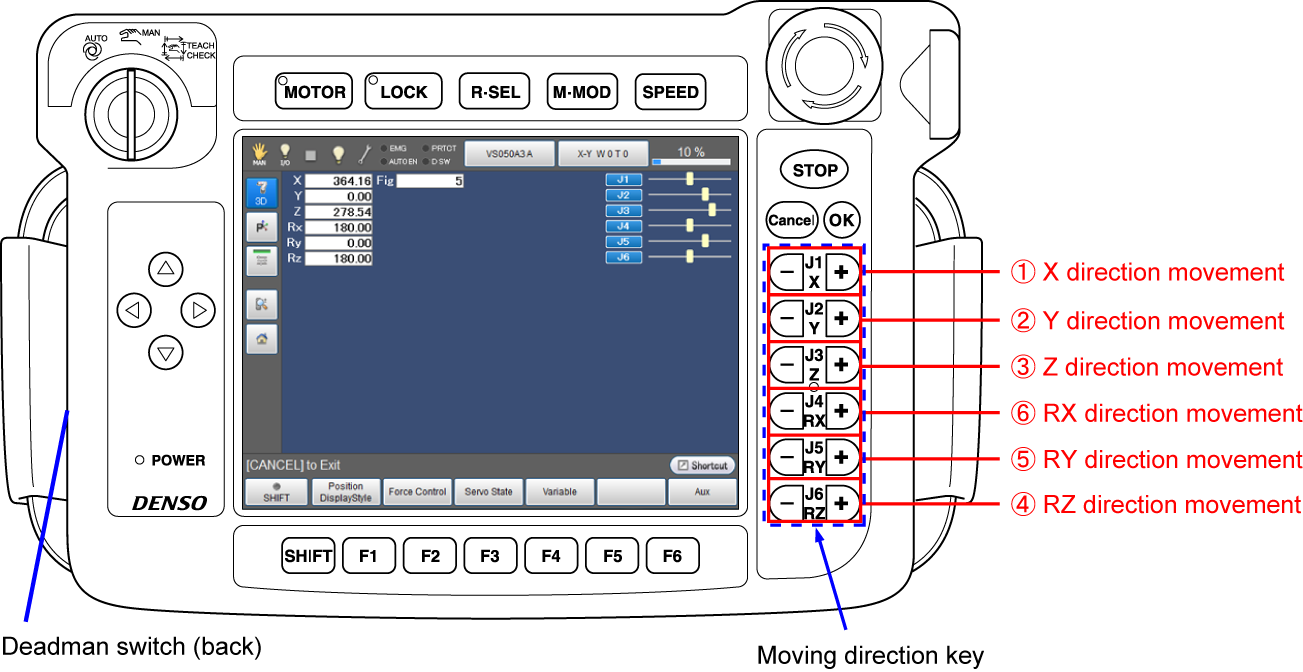
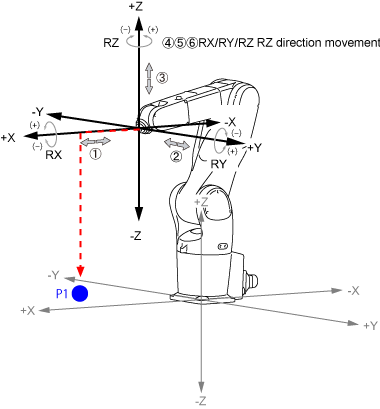
The image above shows the movement of X-Y mode.
Saving the Teaching Value in Variable P1.
Follow the procedure below to save the teaching value in [VarName P1].
1
Press [F4 Variable].

Display the screen as shown in the next procedure.
2
Select variable type in the variable window.
This procedure is for saving position in P variable; hence, press [P variable tab] on the screen.
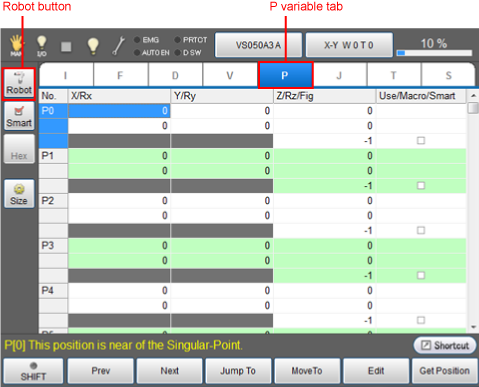
If robot arm information is displayed on the right side of screen when variable window opens, the information can be deleted by pressing [Robot] button.
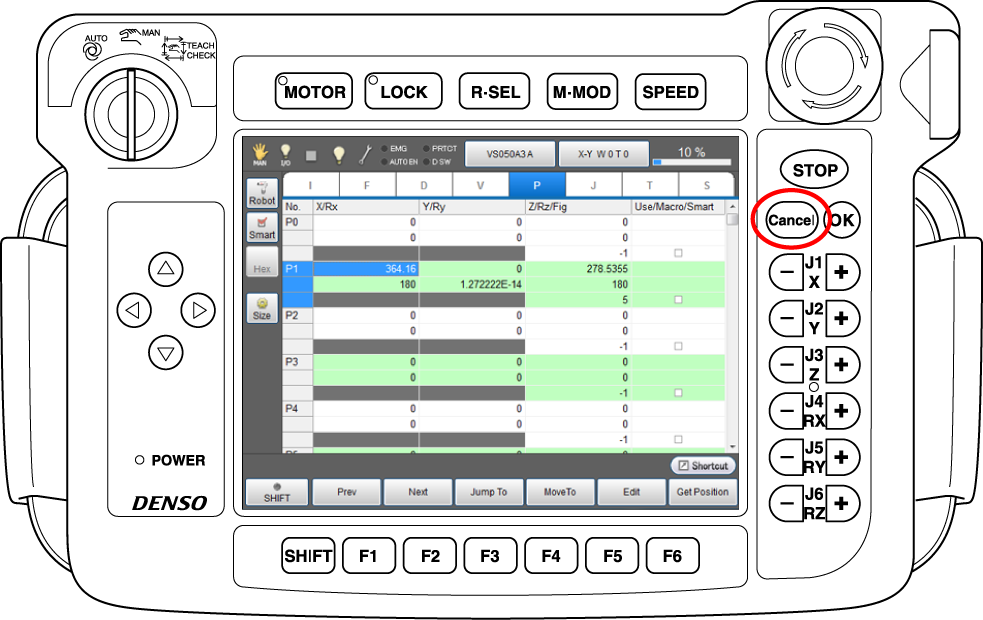
3
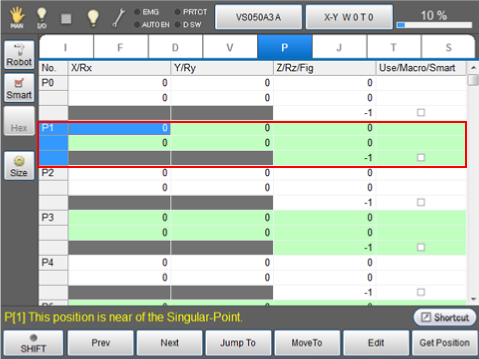
Select the field of [VarName P1] by using cursor key or jog dial.
This can be also selected by directly pressing any of data field for variable name P1 on the screen.
12 types of data per one variable will be displayed in P variable screen as shown in the figure.
If one of 12 types of data is highlighted when selecting [VarName P1], this means that [VarName P1] is selected.
4
Confirm that [VarName P1] is selected.
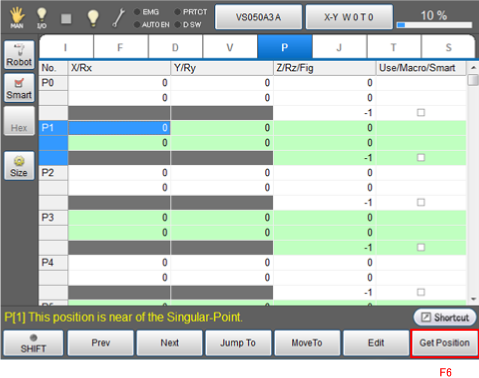
5
Press [F6 Get Position].
6
Check the system message. If you agree the message, select a checkbox of "Write the coordinate system information to Usage." and then press [OK]. (This function is available in Ver.1.8.* or higher.)
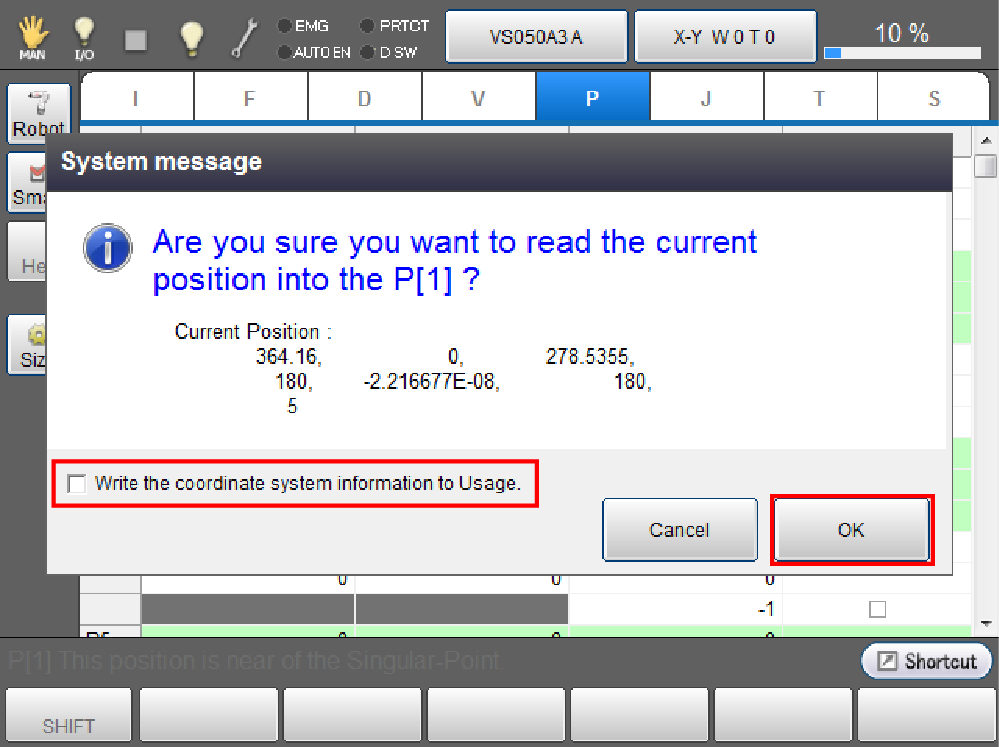
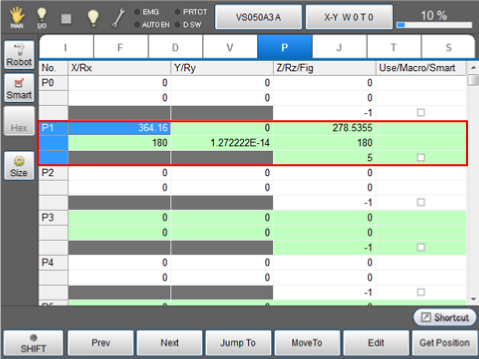
The current position is loaded as variable P1. Coordinate system information is written in Usage (Use/Macro/Smart) cell.
- If any data is already written in the Usage cell, a new coordinate system information will overwrite it.
- When a controller is rebooted, the check box of "Write the coordinate system information to Usage" remains selected. (Ver.1.13.* or higher)
- To clear a coordinate system information in a Usage cell, select desired Usage cell, and press [F5 Edit].
Teaching Robot Position (P2) and Saving it to [VarName P2]
1
Press [Cancel] button once to go back to [Current Robot Position] window.
2
Press moving direction keys as required while pressing the deadman switch to move robot to the position to be set as P2.
3
Follow the procedure described in "Saving the teaching value in VarName P1" to save the value of P2 in [VarName P2].
Now, teaching of P1 and P2 is completed.
For information about how to move to the specified positions, refer to "Move to the Position Specified by Variable (only for J type, T type, and P type)" of TEACH PENDANT OPERATION GUIDE.
ID : 5222