
ID : 5605
System Configuration
The whole configuration of the robot system is shown below.
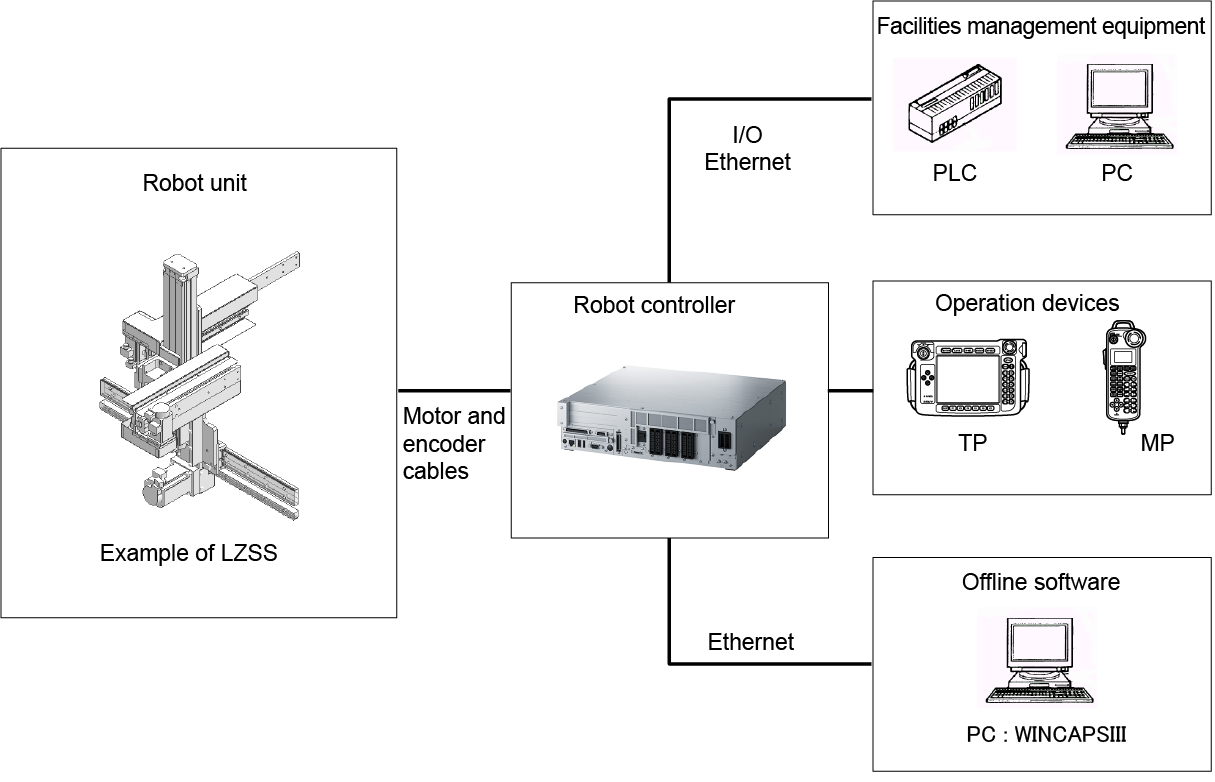
Robot Unit
This is a transportation robot unit which conveys, casts and takes out workpieces mainly between processes or facilities. There are eight types of robot unit that have different axis mechanisms. You can select desired robot unit depending on your needs. For details, see "Robot Type". Hands or other end effectors should be attached to the flange by the customer.
Robot Controller
The controller controls the motion of the robot unit according to programs built with signals sent from the connected facilities management equipment. When an operation device is connected, it allows the customer to manually operate the robot unit or make various settings.
Operation Devices
The operation devices are optionally available to manually operate the robot unit or make various settings.
For details about hardware and operation, refer to the "TEACH PENDANT OPERATION GUIDE" and "MINI PENDANT OPERATION GUIDE".
Teach Pendant (TP)
The teach pendant is a multifunctional operation device that enables robot operation, teaching, mode switching, program start, programming, and all settings. The teach pendant can also be used as an operation panel by using the teach pendant panel editor.
Mini-Pendant (MP)
The mini-pendant is a simplified operation device that enables robot operation, teaching, mode switching, program start, and a part of settings.
Offline Software
The software enables backing up of project data in the controller and editing, management, movement simulation of programs. WINCAPSIII is an offline software designed for the Denso robot system. The trial version comes with the robot system at no extra charge. For details, refer to "WINCAPSIII GUIDE".
Facilities Management Equipment
The management equipment is a system that the customer sets up for managing the facilities. Denso robots can be linked with it via CC-Link, DeviceNet, and other various networks.
ID : 5605
- Related Information
- Robot Type