
ID : 5618
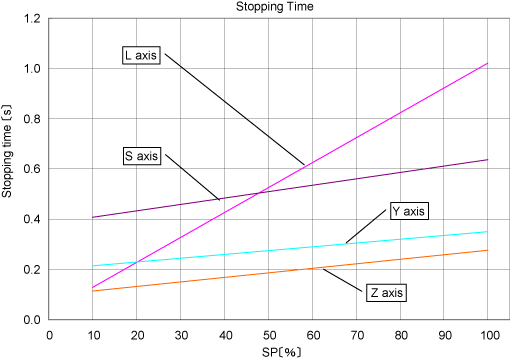
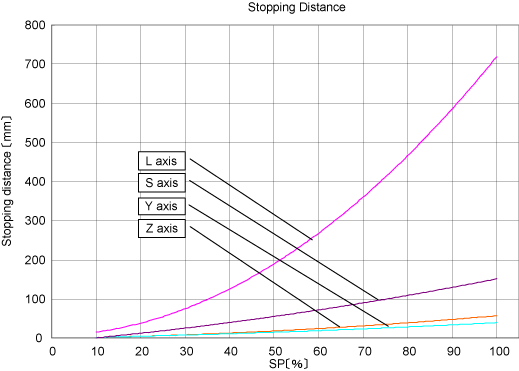
Stopping Time and Distance (Angle) at an Emergency Stop
Pressing the emergency stop button when the robot is in motion stops the robot, the stopping time required from activation of a stop signal and the distance for major three axes vary with the robot speed as shown in the graphs below. When a combination of multiple axes are used, the required stopping time is that of the axis with the longest motion time. There is no variation with the load conditions.
This page shows the stopping time and distance from the activation of a stop signal.
| Measurement conditions | |
|---|---|
| L axis | Maximum speed: 2 m/s, Acceleration: 0.3 G Maximum payload (total weight): 24 kg |
| Y and Z axes | Robot type LYZZ |
| S axis | Maximum speed: 1 m/s, Acceleration: 0.5 G Maximum payload: 3 kg |
Stopping Time
 |
Stopping Distance
 |
ID : 5618