
ID : 5774
Launch the program from WINCAPSIII
In addition to monitoring, WINCAPSIII runs and debugs programs stored inside the robot controller.
Operating Procedure
1
Double-click the program to execute in the Project or Program list window to display it in the Program view area.
2
From the menu bar, click Debug, click Start a task. The following dialog box appears.
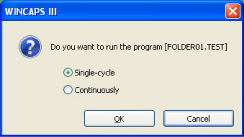
3
Select an option and click OK button to run the robot program as specified.
The robot will operate following the program's commands.
The Arm 3D view, if open, tracks actual robot operation.
When debugging supervisory tasks from WINCAPSIII, the following functions are used.
- Step in, Step-stop
- Halt
- Program reset
- Toggle breakpoint
Note that stop commands to all programs, such as Emergency stop and Reset all programs, cannot stop supervisory tasks.
The WINCAPSIII buttons are useless if the computer crashes or the communications link is lost. To ensure safety, always stay within reach of an Emergency stop button on the teach pendant, the minipendant, or the equipment.
4
Disable Debug function.
From the menu bar, click Connect, point to Monitor Communication, and then select Offline.
ID : 5774