
ID : 6015
Robot Positioning Time
- Following figures show the positioning times used to calculate the cycle time.
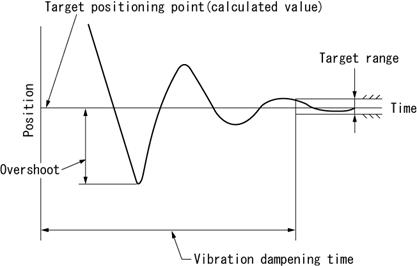
- Positioning time means the time from the start of robot operation to the arrival at the target positioning point.
- After the robot moves to and passes the target positioning point, vibration will be dampened and the robot positioned at the target positioning point as shown in Figure below. This vibration dampening time is not considered in the graph.
- The vibration dampening time depends on factors such as the weight of the end-effector. If the robot is to be used in such a way that it overshoots or if the vibration damping time is of great concern, test the robot carefully beforehand.
-
If acceleration begins before residual vibration of the robot stops, an overcurrent error may be displayed. In this case, take one of the following measures:
X Lower the deceleration of the preceding operation with a DECEL command to reduce residual vibration.
X Keep the robot in stand-by with a DELAY command until residual vibration stops.
X Lower acceleration with an ACCEL command. - Operate the robot with the optimum load setting in accordance with the end-effector weight and workpiece weight. If not, a robot failure may result.
 |
ID : 6015
- Related Information
- VP-6242 Robot Positioning Time
- VP-5243 Robot Positioning Time