
ID : 7563
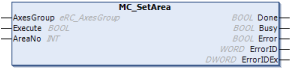
MC_SetArea
To activate detection in a designated detection area.
| Graphic expression | FB category |
|---|---|
 |
Non motion |
Input and Output Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | No | ||
|
||||
Input Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| Execute | Boolean |
|
FALSE | No |
|
||||
| AreaNo | Integer | 0 to 31 | 0 | Yes |
|
||||
(*) : For some Variable, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
Function Description
-
Attention
If you the change work coordinates during area interference (area check) function enabled state, depending on the system, it will take up to 10ms before the new work coordinate is reflected into the interference check area judgment.
To use the new work coordinate for the area interference check without fail, before you change the work coordinate, set the robot so that the area interference does not occur (such as stop the robot motion), wait until the new work coordinate is applied to the system, and restart the robot.
ID : 7563