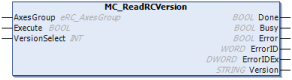
MC_ReadRCVersion
To read the robot controller version.
| Graphic expression |
FB category |
 |
Non motion |
Input and Output Variable
| Variable name |
Data type |
Valid range |
Default |
Omission (*) |
| AxesGroup |
eRC_AxesGroup |
No |
- Robot Group
- Specify a robot variable (structured type data : eRC_AxesGroup) of user-defined type.
|
Input Variable
| Variable name |
Data type |
Valid range |
Default |
Omission (*) |
| Execute |
Boolean |
|
FALSE |
No |
- Execution start
- When the variable is changed from FALSE to TRUE, this FB is executed.
|
| VersionSelect |
Integer |
0 to 6 |
0 |
Yes |
- Target device to obtain version information.
- Specify the target device to obtain version information.
[0 : Controller software]
[1 : Power supply]
[2 : Encoder hub]
[3 : FPGA (main)]
[4 : FPGA (sub)]
[5 : FPGA (Mecha)]
[6 : Safety I/O]
|
(*) : For some Variable, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output Variable
| Variable name |
Data type / Description |
| Done |
Boolean |
- Execution completion confirmation
- TRUE : This FB execution is completed.
FALSE : This FB execution is not completed.
|
| Busy |
Boolean |
- Processing status of this FB
- TRUE : Being executed.
FALSE : Not being executed.
|
| Error |
Boolean |
- Error presence
- TRUE : This FB ended abnormally.
FALSE : This FB ended successfully.
|
| ErrorID |
Word |
- Error location
- 2800 (hexadecimal) : The error occurred in the PLC program.
2801 (hexadecimal) : The error occurred in the robot controller.
|
| ErrorIDEx |
DWord |
- Error Code
- This is a number to identify the error description.
For details, refer to "Error code list".
|
| Version |
String |
- Version
|
Function Description
-
Attention
-
