
ID : 7678
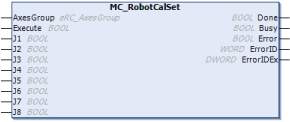
MC_RobotCalSet
To perform CALSET of robot.
| Graphic expression | FB category |
|---|---|
 |
Non motion |
Input and Output Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | No | ||
|
||||
Input Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| Execute | Boolean |
|
FALSE | No |
|
||||
| J1 | Boolean |
|
FALSE | No |
|
||||
| J2 | Boolean |
|
FALSE | No |
|
||||
| J3 | Boolean |
|
FALSE | No |
|
||||
| J4 | Boolean |
|
FALSE | No |
|
||||
| J5 | Boolean |
|
FALSE | No |
|
||||
| J6 | Boolean |
|
FALSE | No |
|
||||
| J7 | Boolean |
|
FALSE | No |
|
||||
| J8 | Boolean |
|
FALSE | No |
|
||||
(*) : For some Variable, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
Function Description
- About CALSET
- Calibrating the relationship between position information recognized by the robot controller and the actual position of the robot arm is called CALSET.
- CALSET uses a previously determined axis position where an axis can be secured. It creates calibration data (CALSET data) that matches the actual axis position (CALSET position) with the encoder value. The angle of the CALSET position is saved in the robot controller as a RANG value.
- The CALSET data is different on each robot.
- CALSET must be performed when any of the motors is replaced or the encoder backup battery goes dead and the position-related data retained in the encoder is lost.
Attention
When an error occurs due to run-down encoder backup batteries, or due to a great impact to the robot during turning-off the controller, you need to reset encoders and perform CALSET.
Before executing this function block, be sure to execute FB "MC_EncReset".
ID : 7678