
ID : 10377
External Mode (Output)
Function
The signal outputs that the robot is ready to start a program from the external device.
Usage
To start a program from the external device, it is necessary to set the executable token to other than TP and set the operation mode to Auto mode. At this time, this signal is used to confirm that the program can be started with the external device.
This signal is always ON if the robot controller is pendant-less state.
When the I/O parameter “162: TP-less mode, enable linkage of external mode output” is set to 1, if the controller is the pendant-less state, this signal turns ON/OFF according to the switching ON/OFF of the Enable Auto. For details, refer to the "I/O" of Parameter List.
ON Conditions
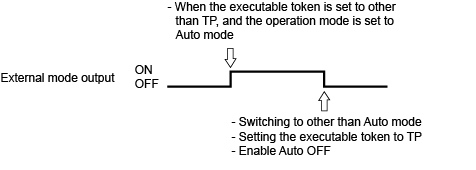
The signal will be turned ON when the executable token is set to other than TP, and the operation mode is set to Auto mode.
OFF Conditions
- When switching to other than Auto mode.
- When setting the executable token to TP.
- When the Enable Auto input is turned OFF.
Timing Chart
|
|
ID : 10377