
ID : 1464
Field Bus Parameter Setting
Set the robot controller with teach pendant.
From the top screen—[F4 I/O]—[F6 Aux.]-[F4 Field Bus parameter]
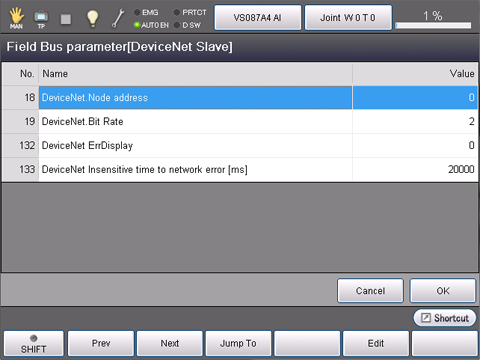
DeviceNet Node address
Set the DeviceNet node address.
| DeviceNet Node address | Available range |
Default Setting |
|---|---|---|
| Value | 0~63 | 0 |
DeviceNet Bit Rate
Set the DeviceNet communication speed.
| DeviceNet Bit Rate [bps] | 125k | 250k | 500k (Default Setting) |
|---|---|---|---|
|
Value |
0 | 1 |
2 |
DeviceNet ErrDisplay
This parameter allows you to choose whether the network error will display in "every time" or is display at the "first time" only.
This parameter is set to "0" (EveryTime) by default for safe operation of the facilities. Every time an I/O operation is carried out, an error will display if any.
To check program operations using dummy I/Os for setting up facilities where no connection to the network has been established, set this parameter to "1" (First Time). Doing so will not display errors once detected, allowing you to check program operations.
| DeviceNet ErrDisplay | First Time |
EveryTime (Default Setting) |
|---|---|---|
| Value | 1 |
0 |
DeviceNet Insensitive time to network error [ms]
If the Communication check of DeviceNet communication starts too early after the Robot controller startup, an error [8350200B Prepare for field network communication] might be displayed immediately after booting.
To prevent such error, adjust "DeviceNet Insensitive time to network error" of Fieldbus parameter longer.
| DeviceNet Insensitive time to network error [ms] | Available range | Default Setting |
|---|---|---|
| Value | 0~65535 |
20000 |
ID : 1464