
ID : 1982
Overview
Cooperative control function is the one that interlocks multiple robots. This function allows to assemble and transport any long and/or flexible objects.
This function is available in Ver.1.9.* or later.
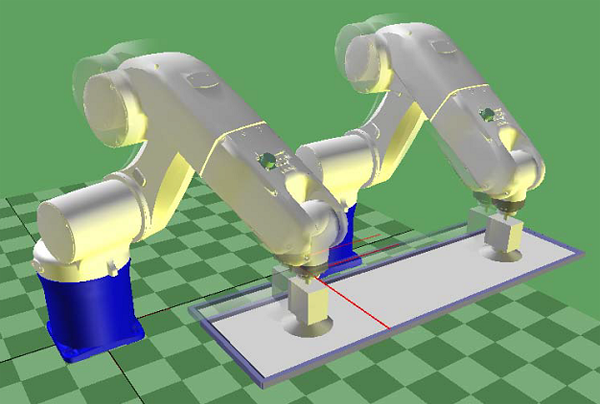
The figure below shows the motion when two robots transport a long object together. A long object can be transported without being transformed by keeping positional relationship between tool end of respective robot while moving.
Programming and command execution for multiple robots in this function are carried out by the same controller. Also, the common coordinate system is used for the teaching of these robots, that makes programming and settings easy.
For a system configuration to execute this function, refer to "System Configuration".
Specifically, the function has the following features.
- Allowing the synchronous motion
- When multiple robots are in motion, operation start and stop can be synchronized. This motion is called a synchronous motion. For details, refer to "Synchronous Motion".
- Allowing the cooperative motion
- Multiple robots can be synchronized with keeping the relative position relationship between tool end of respective robot. This motion is called a cooperative motion. For details, refer to "Cooperative Motion".
- Teaching with the world coordinate system
- The cooperative control function uses a coordinate system common to multiple robots, so multiple robots can share the teach position. This allows easy teaching and position teaching management.
A coordinate system common to robots is called a world coordinate system. For details, refer to "World Coordinate System". - Managing multiple robot motions at once
- When multiple robot motions can be controlled by one robot controller, it will be easier to understand the motion flow of each robot and create a program.
The cooperative control function can also be used only to manage multiple robot motions by one robot controller without using a cooperative or synchronous motion. For details, refer to "Multi Robot".
ID : 1982