
ID : 2954
Parameter Setting
Setting to operate selective extended joint is available with only WINCAPSIII. Set parameters by the process below and send the parameters to the robot controller.
Modify to the Model with Extended Joint
If the robot model is without extended joint (model: without "I"), modify the setting to a robot model with extended joint.
Operation path: [Project] - [Property]
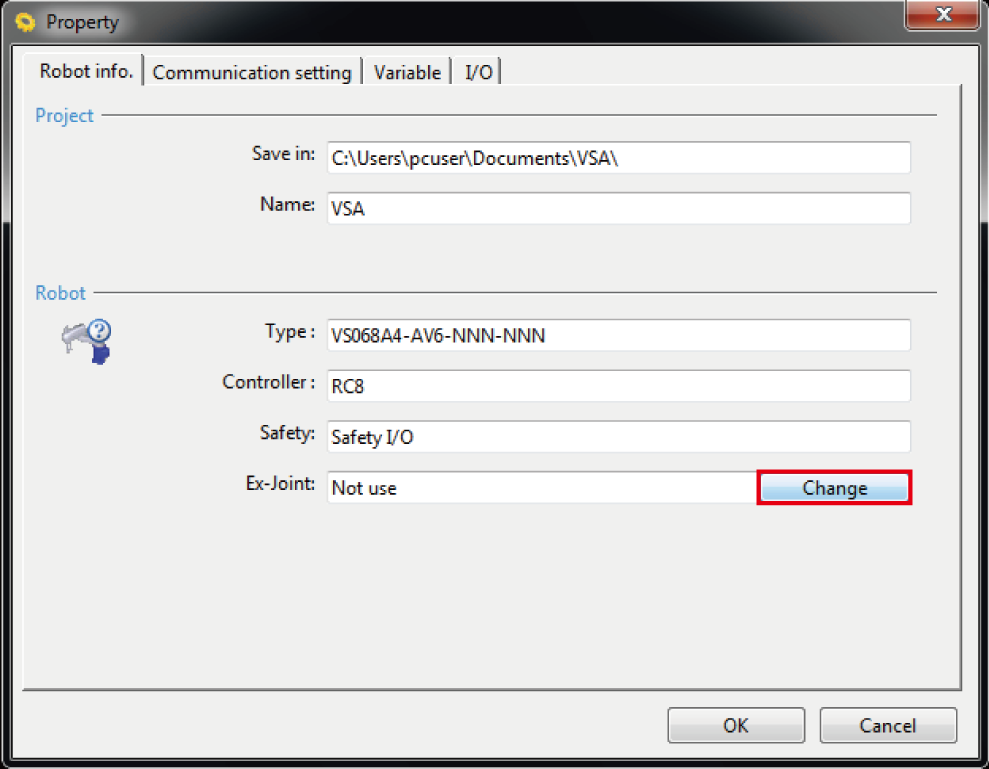
Robot controller supported UL needs to change the hardware parts to set the model with extended joint. For details, contact the Denso service representative.
Setting Extended Joint Parameters
Set Connection setting, Model number, Encoder resolution.
Operation path: [Project] - [Joint Setting Table]
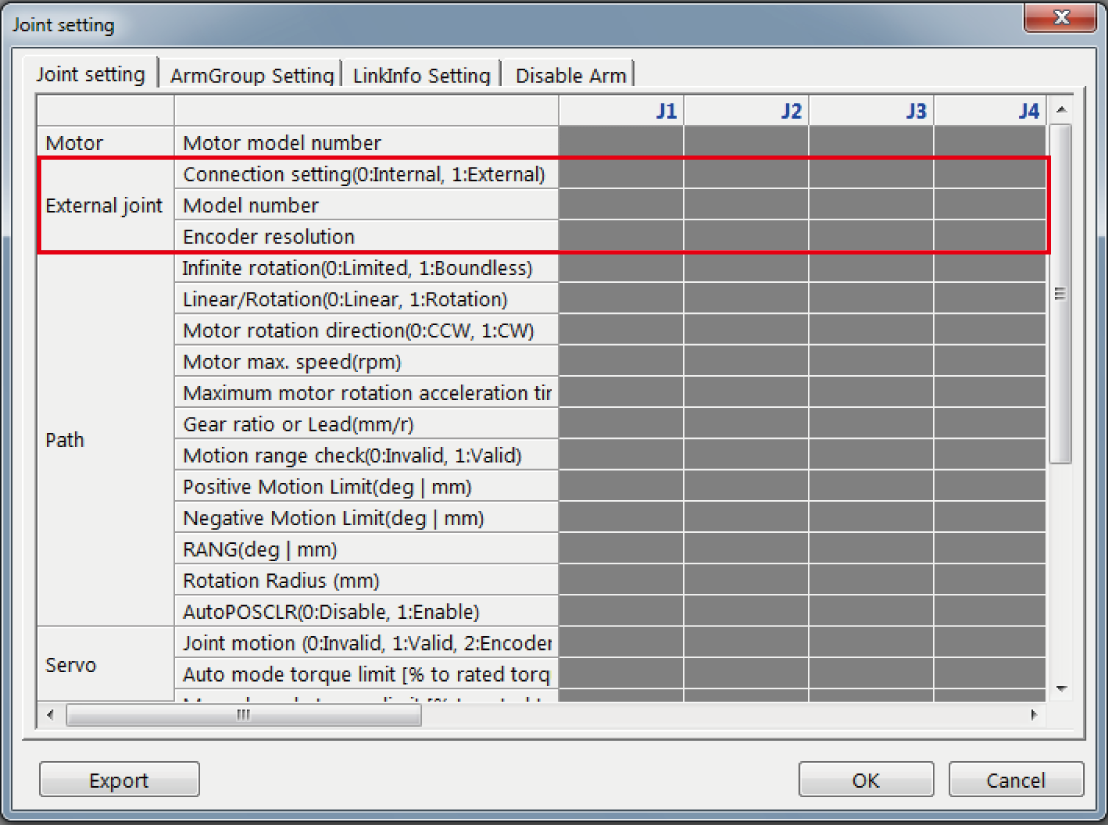
Connection Setting
0: Internal
1: External
Set the joint to be operated as a selective extended joint to "1: External".
In Ver.2.2.*, the maximum number of joints which can be set "1: External" is 2.
| Connection setting | Available range | Default Setting |
|---|---|---|
| Value | 0 to 1 | 0 |
Do NOT set the Connection setting to "1: External" in the state of setting Motor model number to Encoder.
Model Number
0: None
1: SANYO DENKI
2: YASKAWA ELECTRIC
3: Delta Electronics (Available for Ver.2.5.* or higher)
4: Panasonic (Available for Ver.2.5.* or higher)
5: HIWIN (Available for Ver.2.7.* or higher)
Select Maker to be operated as a selective extended joint.
In Ver.2.2.*, when using selective extended joints to multiple joints, select the same maker to set.
| Model Number | Available range | Default Setting |
|---|---|---|
| Value | 0 to 5 | 0 |
Encoder Resolution
Select Encoder resolution. If Encoder resolution is not in the list, input it by hand.
To Select a Linear Motor
Set the encoder resolution, maximum motor revolutions per minute, gear ratio or lead.
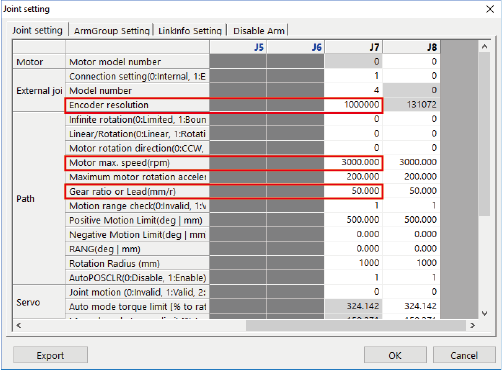
| Encoder resolution | 1000000 (Fixed value) |
|---|---|
| Motor max, speed | Maximum speed (Unit:mm/min) / Lead (Unit:mm) |
| Gear ratio or Lead | Pitch ×1000000 (Unit:mm) |
(Example) When the maximum speed is 0.3m/s and the pitch is 0.1mm.
Encoder resolution:1000000
Gear ratio or Lead:0.1 × 1000000 = 100000
Motor max, speed:0.3 × 1000 × 60 / 100000 = 0.18
Sending Parameter to Robot Controller
After the parameter setting completed, send that parameter to the robot controller to reboot.
If the connection structure of the parameter setting differs from that of actual hardware, EtherCAT communication is unable to setup, and results in an error.
(Example: Although the parameter has set 2 selective extended joints, actually only 1 joint is connected.)
ID : 2954