
ID : 2958
Overview
Robot trajectory can be generated by user with IPC mounted EtherCAT Master; by using EtherCAT communication, if the position command value is sent to RC8 series controller that is Slave, this function allows RC8 series controller to operate according to its position command value.
This function is available in Ver.2.2.* or higher.
EtherCAT communication needs to install EtherCAT Slave Board (Motion) on PCIe slot of RC8 series controller. To enable its function, enable [Slave Motion setting] in Robot Controller Setting.
EtherCAT Slave Board (Motion) has the same function as EtherCAT Slave Board.
For further information about EtherCAT Slave Board (Motion), refer to "ETHERCAT SLAVE BOARD MANUAL" or "Options for Robot Controller".
For further information about the license of "EtherCAT Slave Motion", refer to "OPTIONAL FUNCTION AND LICENSE".
Configuration
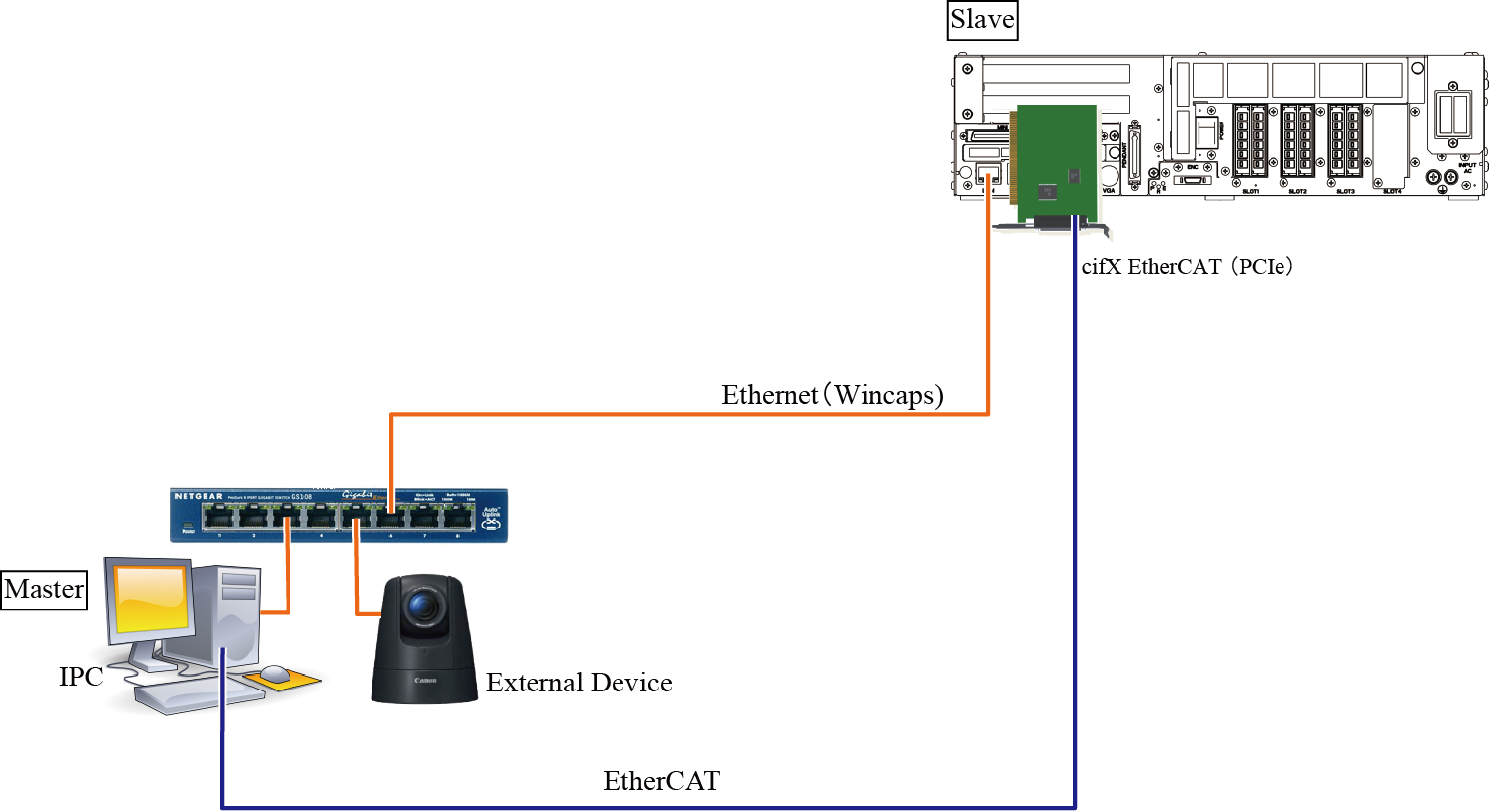
ID : 2958