
ID : 3352
Direct Teaching
"Direct teaching" is an intuitive robot teaching method where users move a robot arm for teaching with their hands.
Direct teaching-available operation mode is called "Direct Mode".
Direct Teaching-Available Robot Series
Direct teaching is available for the following robot series.
Note that the direct teaching is not available for the UL-listed models.
- HS,HSA1,HSR
- HM (except for dust& splash-proof type with 20kg payload)
- XR
Direct Teaching Procedure
Do the following steps.
Use a teach pendant for operation. You cannot use a mini pendant.
- Adjust the Z- balance (only for HM standard type)
- Change the operation mode to the Direct mode.
- Release brakes.
- Perform the direct teaching.
- Exit the direct mode.
1.Adjust the Z-balance
To prevent the third axis from falling by the gravity, robots are equipped with a brake on the third axis (or on the third axis and the forth axis for some robots).
This brake is applied when the motor is off. Before moving the robot arm with your hands, you need to release the brake. Once the brake is released, the robot arm might fall.
HM standard type robots are equipped with an air regulator as a fall prevention. However, improper pressure adjustment will result in the robot arm falling as well. Therefore, before releasing the brake, you need to balance the third axis arm from the following operation path.
Operation path : [F2 Arm] - [F6 Aux]- [F9 Z Balance]
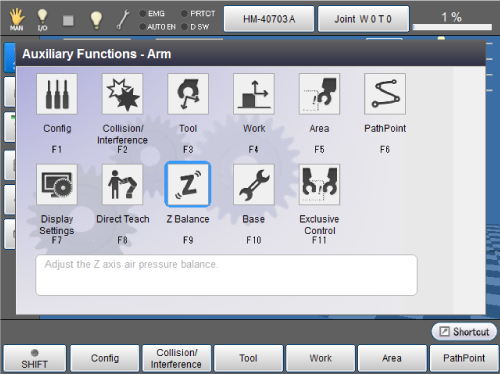
Pressing the [F9 Z Balance] will display the following window to adjust the Z balance.
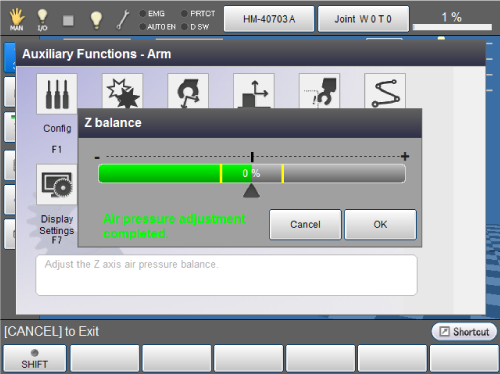
Z balance adjustment must be done under the motor-on state.
For the concrete adjustment procedure, refer to "Z Balance" of the OPERATION GUIDE.
2. Change the Operation Mode to the Direct Mode.
Operation path :[F2 Arm] - [F6 Aux] - [F8 Direct Teach]
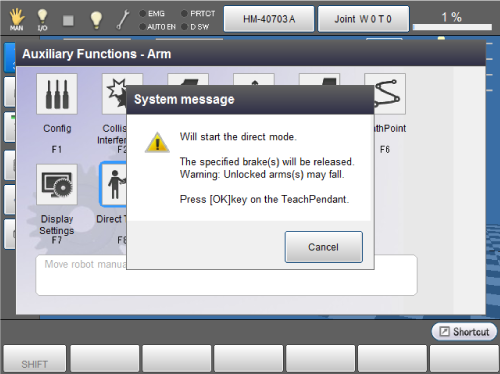
Pressing the [F8 Direct Teach] will display the system message. Once the system message appears, press the [OK] button on the teach pendant.
When you use an HM standard type robot, if the air pressure adjustment has not been completed, the Z balance window is displayed. Perform the air pressure adjustment.
Once the operation mode is switched to the direct mode, an icon on the teach pendant will change.
- Direct mode is not available under the motor-on state. Turn the motor power off beforehand.
- Direct mode is not available under the brake-released state.
3.Release Brakes
Release the brake for direct teaching.
There are two ways to release the brake: to use a teach pendant, and to use a brake release switch on the robot body.
Release the Brake with a Teach Pendant
Operation path : [F2 Arm] - [F12 Maintenance] - [F1 Brake]
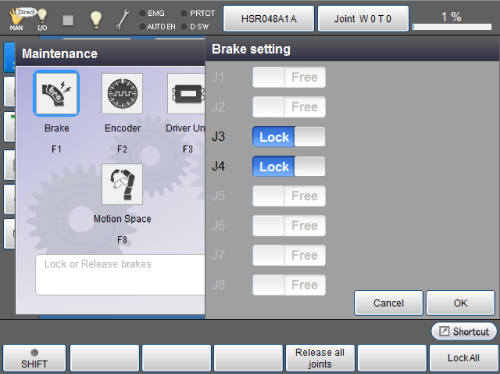
On the teaching pendant window, select an axis where you want to release the brake, and then press [OK], or press [F4 Release all joints]. The following system message will appear. While the system message is displayed, press the [OK] button on the teach pendant.
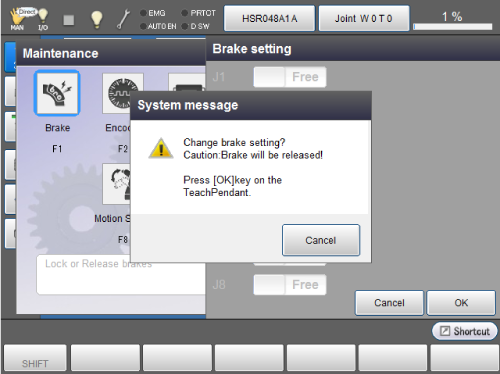
For details, refer to the "Brake Setting" of the TEACH PENDANT OPERATION GUIDE.
Brakes are kept released until the direct mode is released or the brakes are locked.
The brake-release condition required for the direct mode differs depending on the robot models as the following shows.
| Robot series | Brake-equipped axis | Description |
|---|---|---|
| HS | 3rd axis,4th axis | The brake on the third axis needs to be released. The brake on the forth axis will be automatically released once the operation mode is changed to the direct mode. |
| HSA1,HSR | 3rd axis,4th axis | The brakes on the third axis and the fourth axis need to be released. |
| HM Standard | 3rd axis | No brake-release operation is required since the brake on the third axis is automatically released once the operation mode is changed to the direct mode. |
| HM Dust- & Splash-proof(10kg payload) | 3rd axis,4th axis | The brake on the third axis needs to be released. The brake on the forth axis will be automatically released once the operation mode is changed to the direct mode. |
| XR | 3rd axis | The brake on the third axis needs to be released. |
Brake Release with a Brake Release Switch
Press the brake release switch on the robot body. Brake is released while this button is being pressed. This operation is available for the following robot models.
For about the position of the brake release switch, refer to "Moving Each Axis with Motor Power OFF in Emergency Stop" in the robot manual of your robot.
4.Perform the Direct Teaching
Any operations other than moving the robot arm directly with user's hands are the same as the ones for the remote teaching. Refer to "Teaching" of the TEACH PENDANT OPERATION GUIDE.
5.Exit the Direct Mode
Operation path :[F2 Arm] - [F6 Aux] - [F8 Direct Teach]
Pressing the [F8 Direct Teach] displays the system message. Once the system message appears, press the [OK] button.
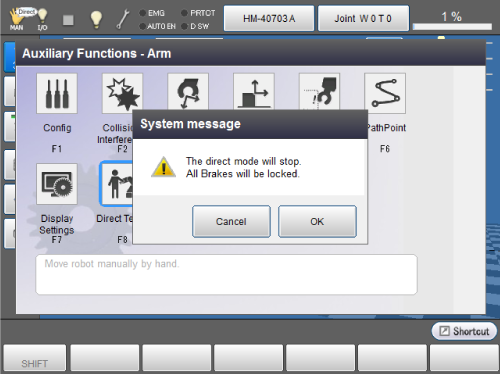
All brakes being released will be locked automatically.
Also, the motion mode icon on the teach pendant will be changed.

ID : 3352