
ID : 3393
Pylon4 Setting
This section explains the setting of Basler GigE camera.
Set IP address, ID and a trigger mode with the pylon IP Configurator.
Use a camera in the trigger mode.
If the trigger mode is off, you will fail to connect the computer to the camera.
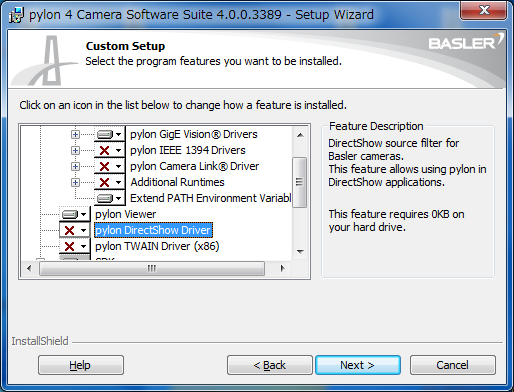
How to Install
Install Basler tools as follows:
- Tools to be installed
- pylon GigE Vision Drivers
- Extend PATH Environment Variable
- pylon Viewer - Tools not to be installed
- pylon DirectShow Driver
Settings of IP Address and ID
1
Start the pylon IP Configurator.
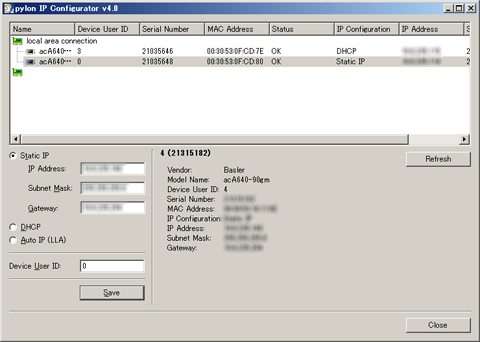
2
Select a camera that you intend to set IP address and ID.
3
Enter IP Address, Subnet Mask, Gateway and Device User ID, and then click [Save].
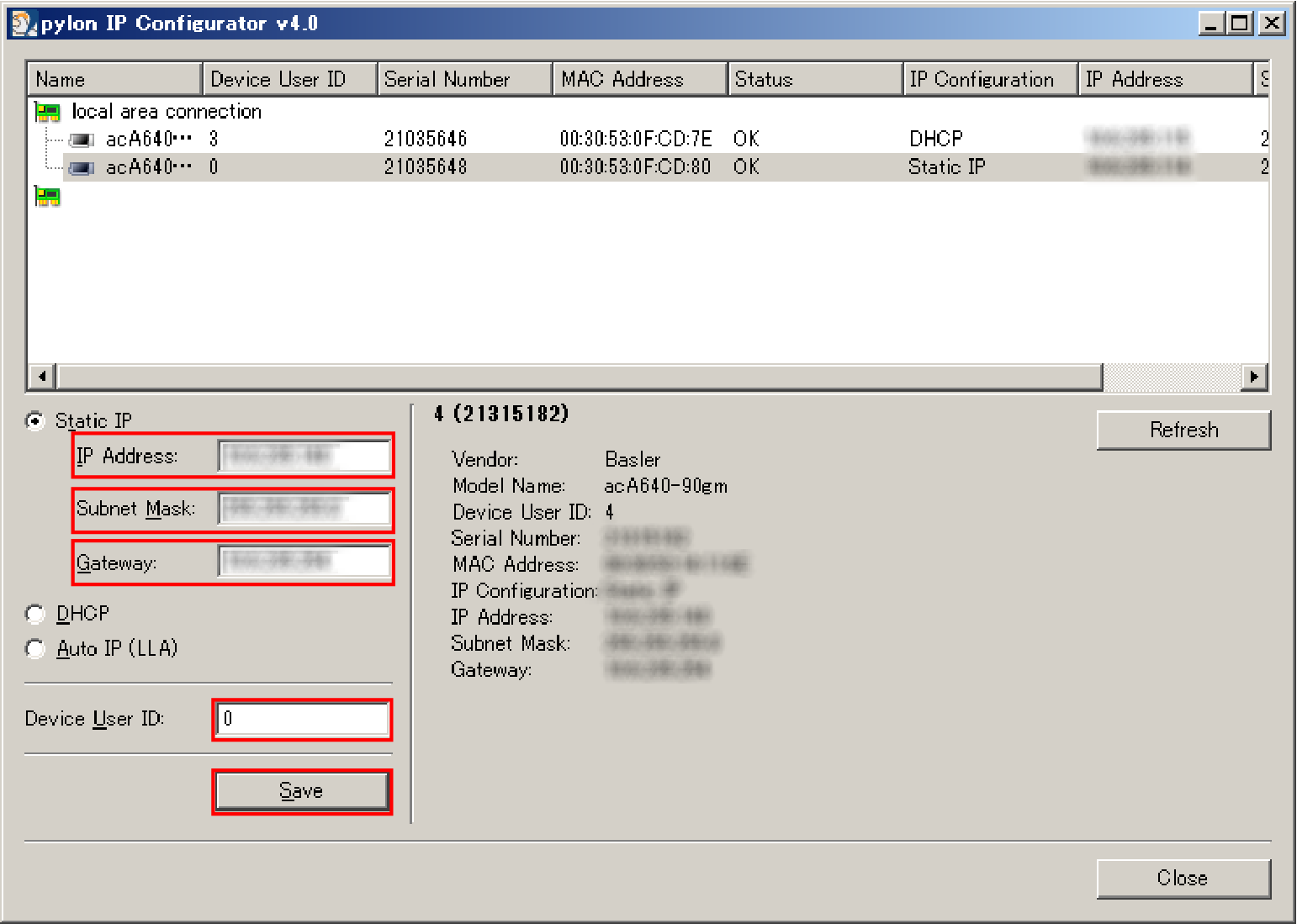
Device User ID ranges from 0 to 4.
User ID 0 to 4 correspond to ID 201 to 205 of the controller image storage area.
Do not use duplicate ID when multiple cameras are used.
Trigger Mode Setting
1
Start the pylon Viewer.
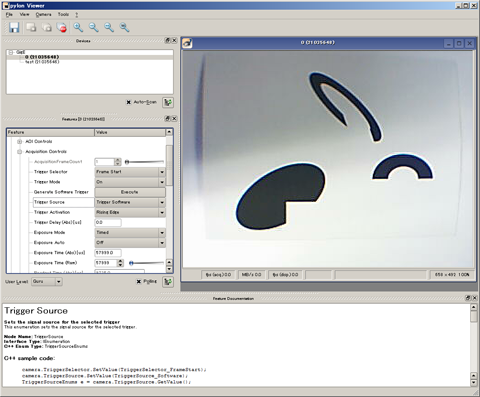
2
Set the User Level to Expert or higher.
3
In the Future tab, select Acquisition Controls, and then click + to open the menu.
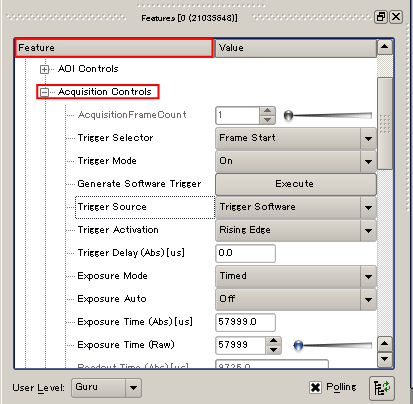
4
Set the Trigger Mode to ON.
Set Trigger Source according to the mode used.
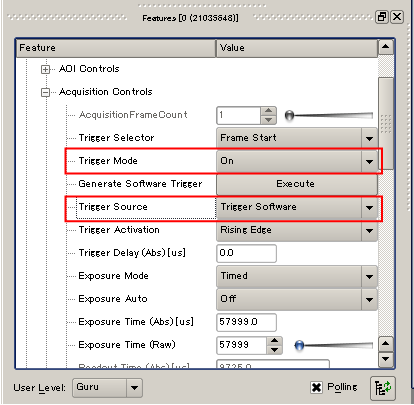
| Item Name | Value |
|---|---|
| Trigger Software | Software trigger |
| Line* | External trigger (hardware trigger) |
5
Set other usage conditions. (e.g. shutter, speed and gain)
6
Select a set of items which setting is saved by Configuration Set Selector.
To save the conditions being set, click [Execute] button under the User Set Save.
The setting will be cancelled unless the Execute button is clicked.
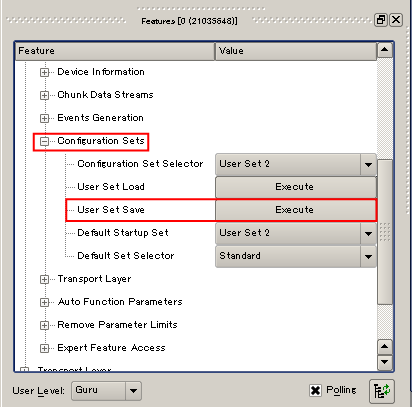
When switch on the camera, it starts with the setting selected by the Default Startup Set. (In this example, User Set 2)
Making the Robot Controller Recognize the Camera
To make a robot controller recognize a camera automatically, before you turn on the robot controller, turn on the power supply of the camera. If the robot controller has been started when the camera starts, the robot controller cannot recognize the camera automatically.
When the camera cannot be recognized automatically for any reason (such as the robot controller has been started), make the robot controller recognize the camera manually. The following describes the operation procedures.
- In the Built-in vision menu, press [F6 Disconnect], close the Built-in vision function.
- [F6 Disconnect] is changed to [F6 Connect]. Press [F6 Connect] to recognize a camera.
For details, refer to "Displaying and Operating the Built-in Vision".
ID : 3393