
ID : 4846
Changing the R-axis Motion Range Using WINCAPSIII
The R-axis motion range data held in the robot controller can be changed using WINCAPSIII.
1
Start WINCAPSIII and log on as a Programmer.
Create a project for the XR series in WINCAPSIII.
2
Choose Project | Property | R Range tab.
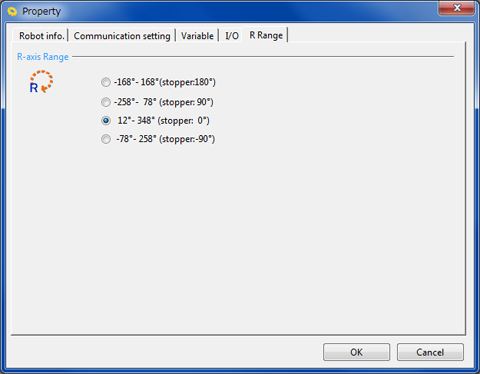
3
Select the R-axis motion range and press [OK].
Refer to "2nd-axis (R-axis) Mechanical End Change".
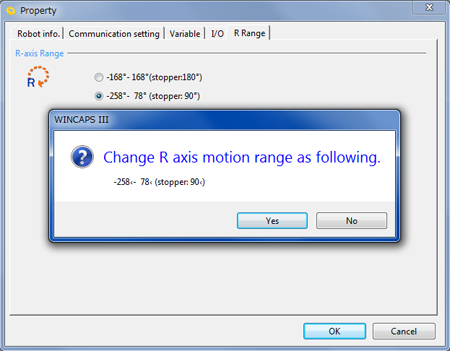
4
The following message appears, prompting you to check the motion range angles and the mechanical stop position.
If they are [OK], press the [Yes].
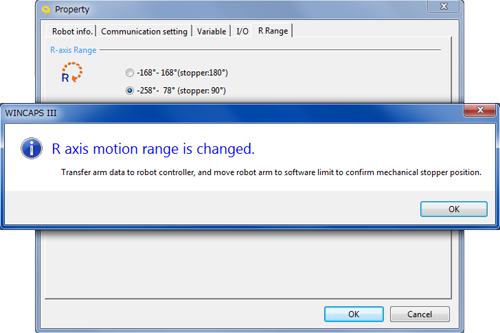
5
Check that the R-axis motion range of the project in WINCAPSIII has been changed.
6
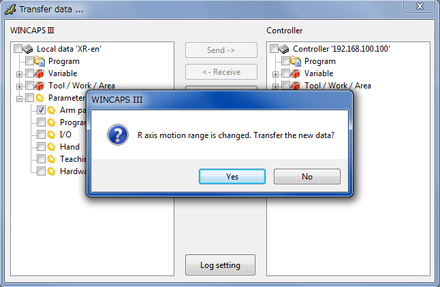
To transfer the arm data of the project from WINCAPSIII to the robot controller, choose Connect | Transfer data.
The following confirmation message appears since the R-axis motion range data held in the robot controller is different from the one specified in WINCAPSIII.
Press [OK].
7
In the Transfer data window, select Parameters | Arm parameters.
The confirmation message appears. Press [Yes].
Then, press [Send].
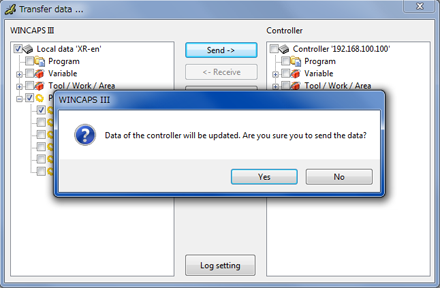
8
The confirmation message appears.
Press [Yes].
9
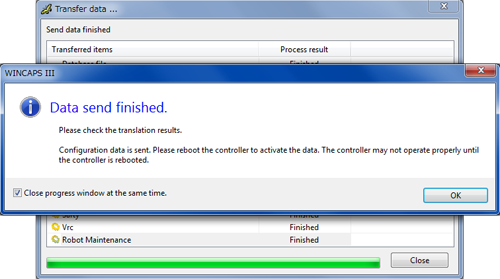
The following message appears, indicating that the R-axis motion range data has been transferred to the robot controller and the one held in the controller has been updated.
Move the robot's R-axis and confirm that the motion range is properly changed.
ID : 4846