
ID : 4927
Manual Gain Tuning
You can manage the following parameters for manual gain tuning:
- Positional loop gain
- Positional loop FF gain
- Allowable positional deviation range
- Speed proportional gain
- Speed integral gain
- Low pass filter2 time constant
- Torque offset setting
The block diagram for the servo system is shown below.
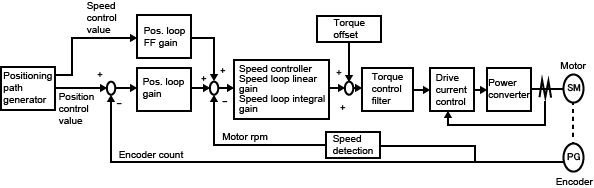
An electric servo loop system consists of the three feed back systems--positioning loop, speed control loop, and drive current loop. The inner the loop is, the quicker response required. If the response of an inner loop is not sufficiently high for an outer loop, then the overall system response degrades and vibrations or oscillations may occur in the joint support system.
In this system, the innermost loop is the drive current loop and the outermost loop, the positioning loop.
You need to do gain tuning for the positioning loop and speed control loop. The drive current loop is designed to have sufficiently high response for all applications allowable to the joint support system.
ID : 4927