
ID : 4928
Operating Procedure for Manual Gain Tuning
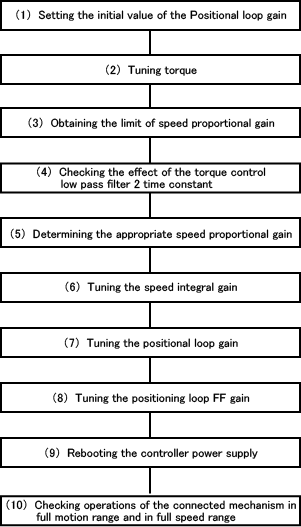
The block diagram below shows items that require setups to operate manual gain tuning.
(1) Setting the initial value of the Positional loop gain
Increasing the positioning loop gain will reduce the positioning time.
However, increasing the gain exceeding the natural oscillation frequency of the connected mechanism will easily bring vibration or overshoot.
As a guide, use the value of 1/2π of the natural oscillation frequency of the connected mechanism is recommended.
If the natural oscillation frequency is 20 Hz, for instance, set the positioning loop gain to 20/2/π=3.2[Hz].
For detailed information, see "Setting the servo configuration parameters".
(2) Tuning torque
If almost constant, unbalanced load (e.g., force of gravity) applies to the motor, then set the torque offset calculated from the load.
(3)Obtaining the limit of speed proportional gain
While increasing the speed proportional gain gradually, find the upper limit of the proportional gain at which the connected mechanism will start producing abnormal noises or oscillations.
(4)Checking the effect of the torque control low pass filter 2 time constant
First set the torque control low pass filter 2 time constant parameter to "0" and find the upper limit of speed proportional gain again. If the speed proportional gain obtained here is lower than the previous one obtained in step (3), reset it to the default setting.
(5)Determining the appropriate speed proportional gain
Apply 80% of the limit obtained in steps (3) and (4) to the speed proportion on the connected mechanism.
(6)Tuning the speed integral gain
Gradually increase the speed integral gain so that the positioning time and peaks of overshoot and undershoot will be minimized to optimize the connected mechanism.
(7)Tuning the positional loop gain
If the connected mechanism is still oscillatory after carrying out the procedure in step (6), then decrease the positional loop gain.
If you decrease the positioning time further after tuning in steps (3) through (6), then gradually increase the positional loop gain to the extent that no noise or oscillation will be produced.
(8)Tuning the positioning loop FF gain
If you further decrease the positioning time of the connected mechanism, gradually increase the positioning loop FF gain to the extend that no oscillation will be produced.
(9)Rebooting the controller power supply
Reboot the controller so as to enables the settings performed above (1) to (8).
(10)Checking operations of the connected mechanism in full motion range and in full speed range
Run the connected mechanism in the full motion range while changing the speed gradually. If any abnormal noises or vibrations occur at some particular points, then check whether the mechanism slides evenly.
If any abnormal noise occurs in some particular speed, tune the torque control low pass filter parameter again and check whether the abnormal noise decreases.
If tuning-up of the mechanism and torque control low pass filter parameter cannot suppress abnormal noises, then decrease the speed proportional gain and speed integral gain in the same proportion. For detailed information, see "Quick Tuning Function for Speed Control System Gain".
If any vibration occurs in some particular speed, decrease the speed integral gain, positional loop gain, and/or positioning loop FF gain.
-
Servomotors recommended earlier in this manual will issue torque ripple 3 times per rotation. The torque transmission mechanism may also issue torque ripple specific times per rotation at its output shaft.
Therefore, the frequency of the torque ripple may vary according to the speed so as to become equal to the natural frequency of the connected mechanism.
If vibrations are large in some specific speed, decrease the speed integral gain, positional loop gain and/or positioning loop FF gain as well as stated above. - When performing gain tuning, use auto gain tuning as a main tool because manual gain tuning is supplemental tool. Use manual gain tuning when auto gain tuning is not available.
ID : 4928