
ID : 7922
Program Structure
The following shows the program structure created by the Command-Slave function.
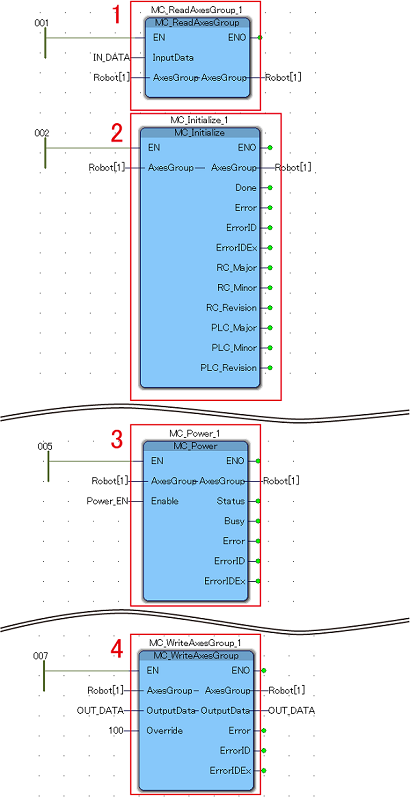
1.MC_ReadAxesGroup
To read robot-related data, such as robot motion status, from a robot controller and save it to "AxisGroup". Data obtained by this FB will be used to control robots from other FB.
Therefore, when using Command-Slave function, be sure to place this FB at the top of the program.
For details about this FB, refer to "MC_ReadAxesGroup" of Command-Slave Reference Guide_ProConOS.
2.MC_Initialize
To obtain the Command-Slave version of the PLC and the robot controller and check if they are the same.
If the Command-Slave version of the PLC and the robot controller are different, the robot may fail to run properly. Once the communication has been established, this FB monitors whether if the PLC and the robot controller communicate properly.
Therefore, place this FB prior to any FBs other than "MC_ReadAxesGroup".
For details about this FB, refer to "MC_Initialize" of Command-Slave Reference Guide_ProConOS.
3.MC_Power
To make FB with the FB category "Motion" executable and turn on the robot motor. FB with the FB category "Motion" needs to be made executable by this FB before execution.
Therefore, place this FB prior to FB with the FB category "Motion" .
For details about this FB, refer to "MC_Power" of Command-Slave Reference Guide_ProConOS.
4.MC_WriteAxesGroup
To send an instruction in "AxesGroup", which has been updated by other FB of Command-Slave, to the robot controller. The robot controller controls robots by receiving the instruction from this FB.
Therefore, when using Command-Slave function, be sure to place this FB in the end of the program.
For details about this FB, refer to "MC_WriteAxesGroup" of Command-Slave Reference Guide_ProConOS.
ID : 7922