
ID : 4052
Simulating a Program Operation with Remote TP/Virtual TP
The motion of the robot program created can be simulated using Remote TP/Virtual TP without moving the actual robot.
1
To enter the machine lock status, confirm that the LED of [MOTOR] is turned off and press [LOCK].
In the machine lock status, the LED of [LOCK] is turned on.
2
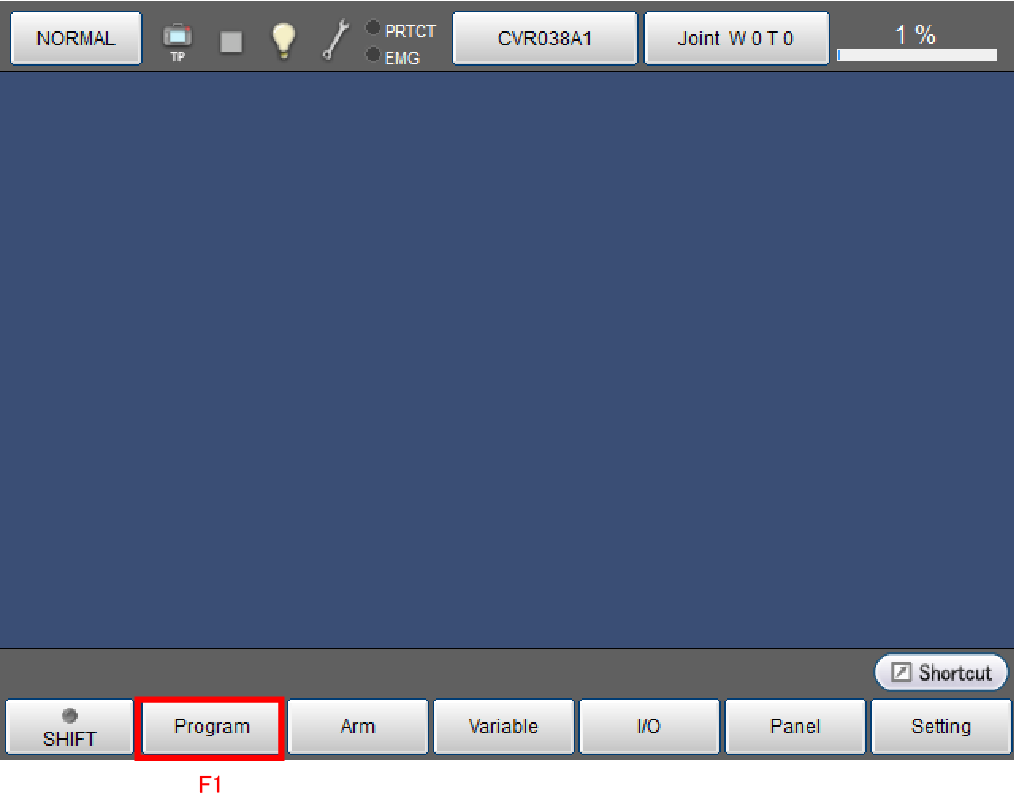
Press [F1 Program] in the top window.
3
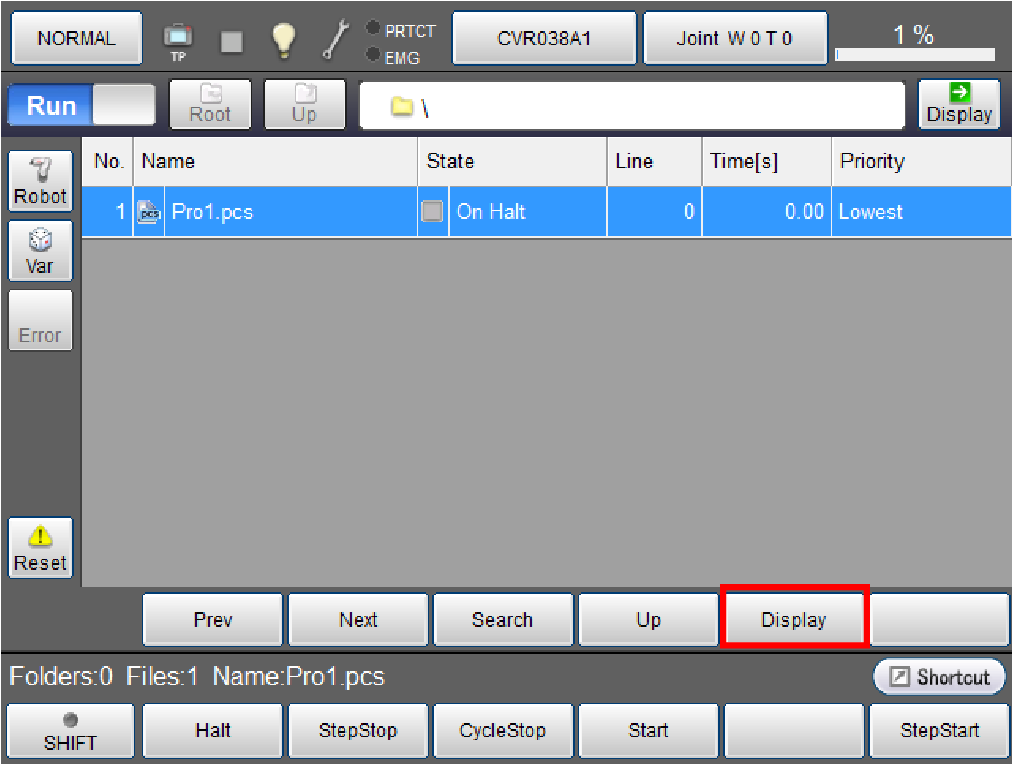
Select the program in [Program list window] and press [Display].
4
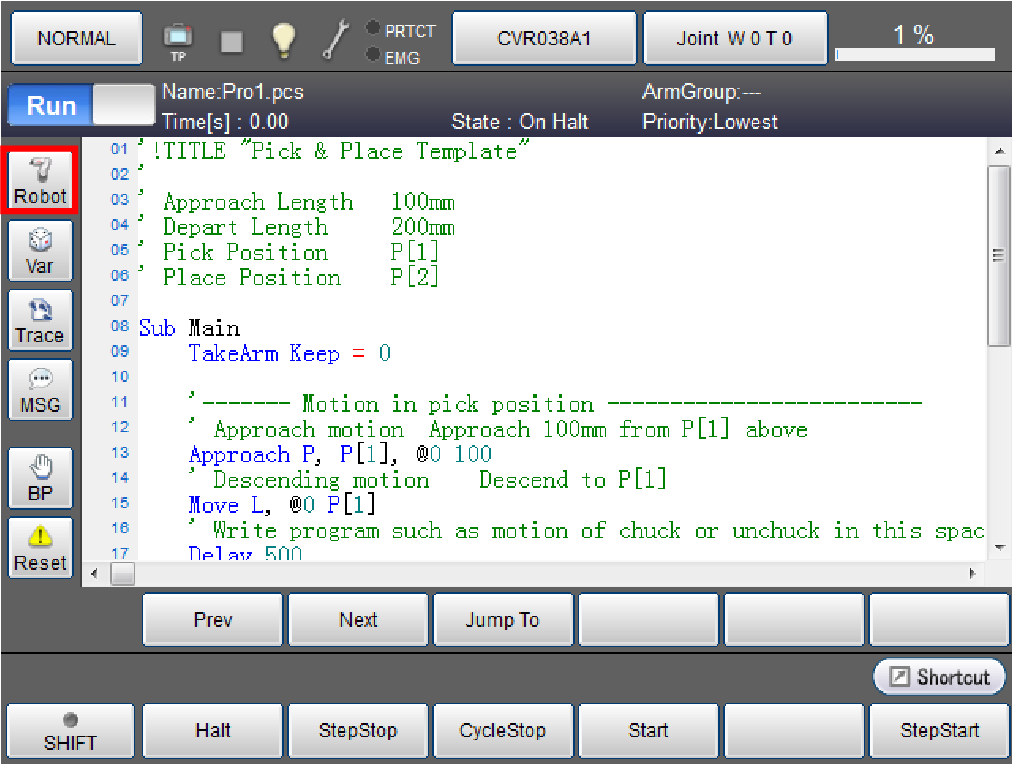
The program is displayed.
Click the [Robot] button in the left side of the screen.
5
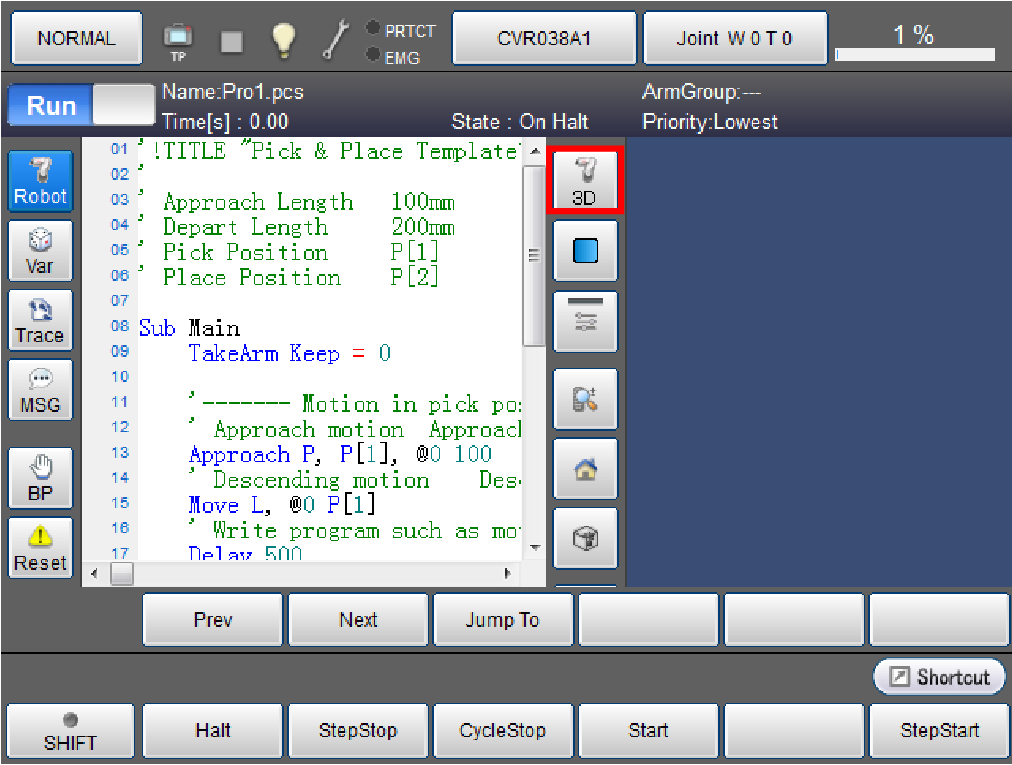
The robot is displayed.
If not displayed, click [3D] button.
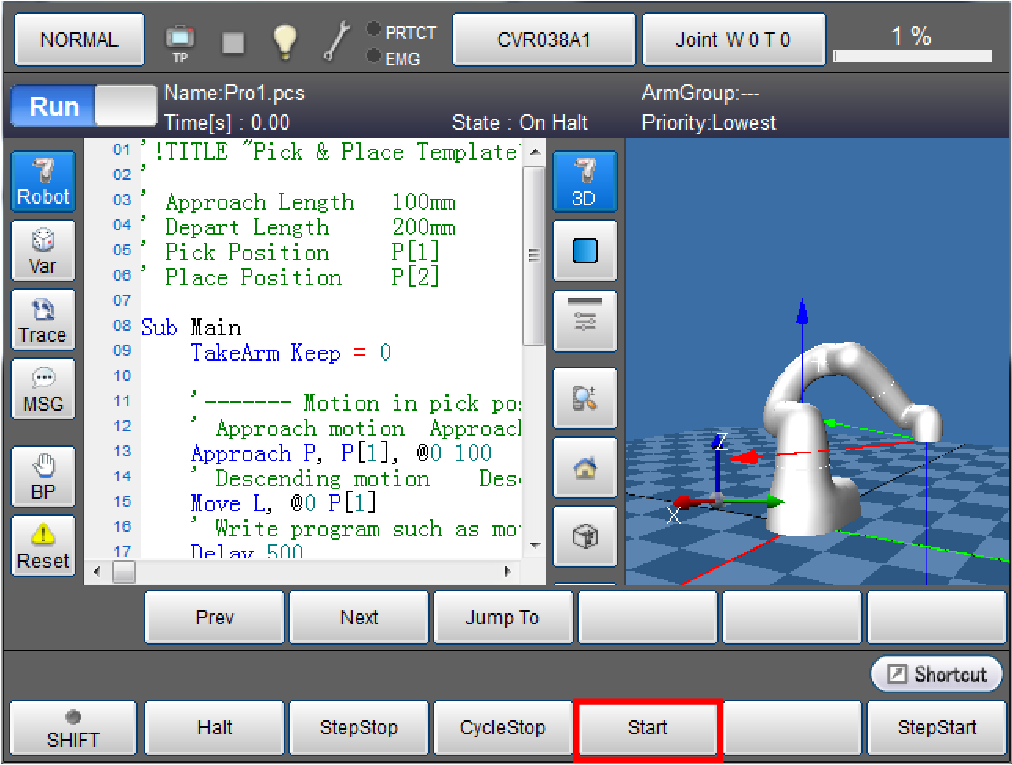
6
Click [Start].
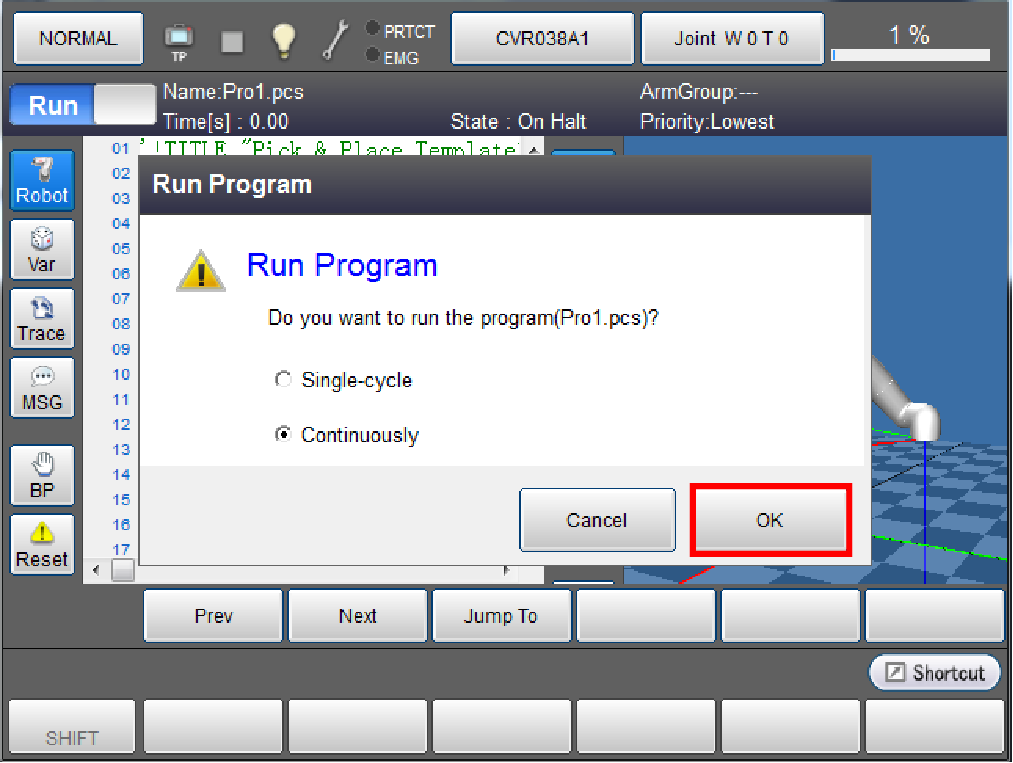
7
The system message will be displayed. Select one of the options. Press [OK].
In this example [Continuously] is selected.
8
The robot image on the right side of the screen moves according to the program displayed on the left side.
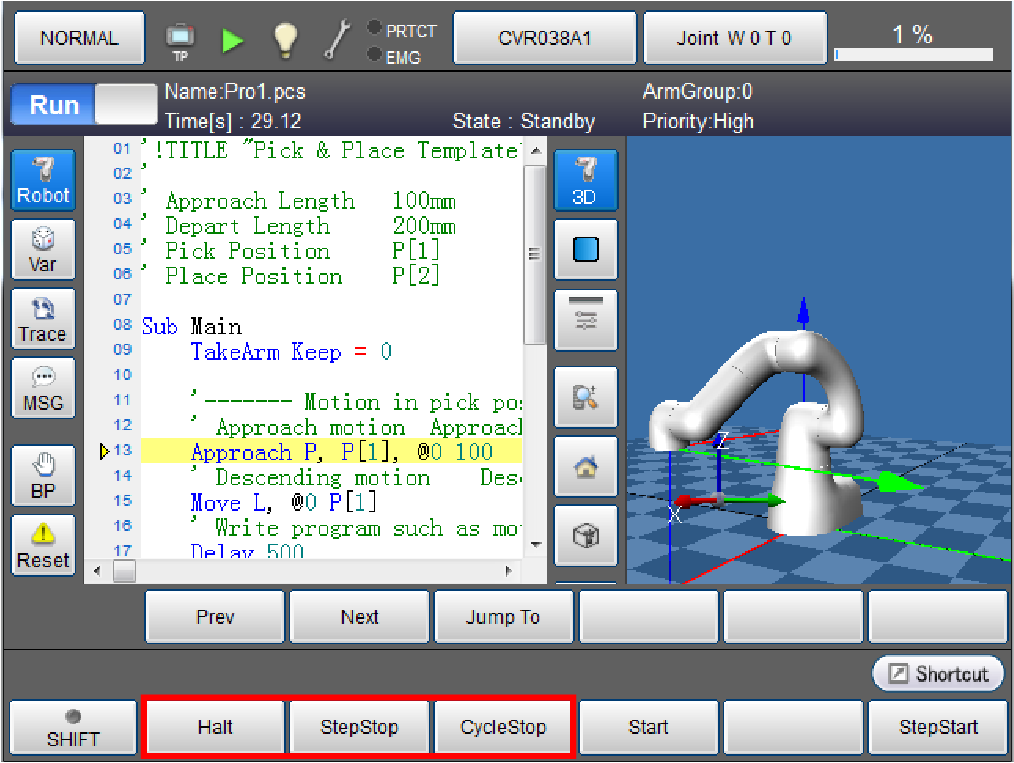
To stop a motion of the robot, press one of the three options: [Halt], [Step Stop], or [Cycle Stop].
- [Halt]: Executing this immediately stops the movement.
- [Step Stop]: Executing this stops the step which was running when the button was pressed after its completion.
- [Cycle Stop]: Executing this stops the program with its End Sub instruction. This is used when the robot is run continuously.
ID : 4052