
ID : 7160
Use of Hand Page
Use the hand page of Remote TP or Virtual TP to check the gripper state, open and close the gripper manually, or set the point data.
This section describes how to use the hand page.
Launching of Hand Page
On the top screen of Remote TP or Virtual TP, press [F9 Hand] or select [Hand] using the shortcut key. The hand page is launched.
Screen Elements of Hand Page
The hand page consists of three parts: (1) Gripper state display, (2) Manual operation, and (3) Point data display.
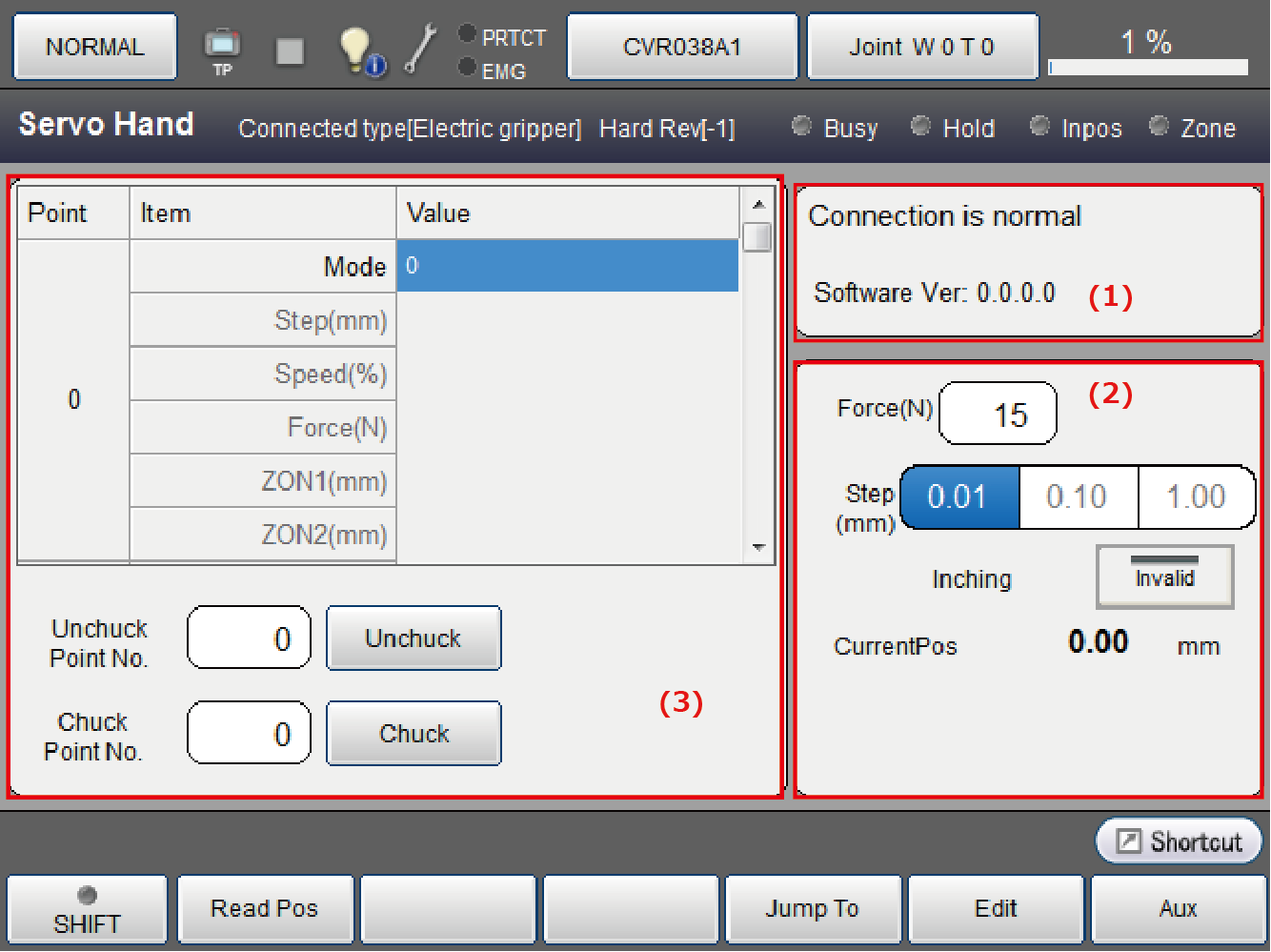
(1) Gripper State Display
The gripper state display pane displays the hand operating status, connection status, and software version.The following statuses are displayed:
| Busy |
Displays the busy status. Light on: Under operation, Light off: Command state |
|---|---|
| Hold |
Displays the gripping state. Light on: Gripping, Light off: Release |
| Inpos | Displays whether the gripper has reached the target position at the motion end. Light on: Reached, Light off: Not reached |
| Zone | Turns ON when the gripper motion end position is within the Zone range. Light on: In range, Light off: Out of range |
| Connection status | Displays the gripper connection status.There are the following three types: |
| Software version | Displays the software version of the gripper. |
(2) Manual Operation
Press the Manual Operation buttons on the Remote TP or Virtual TP to move the gripper. The following values can be set for the manual operation. These setting values are used also for the operation using the gripper plus/gripper minus buttons on the COBOTTA unit.
To move the gripper with the Manual Operation buttons, press the Motion allow button at the same time.
| Force (N) (*1) |
Set the gripping force to be applied to grip a workpiece during manual operation. The unit is [N]. The maximum gripping force is 20N. |
|---|---|
| Inching | Enable or disable the inching mode. When the inching mode is enabled on this screen, operation with the gripper plus/minus buttons on the arm will also be in inching mode. |
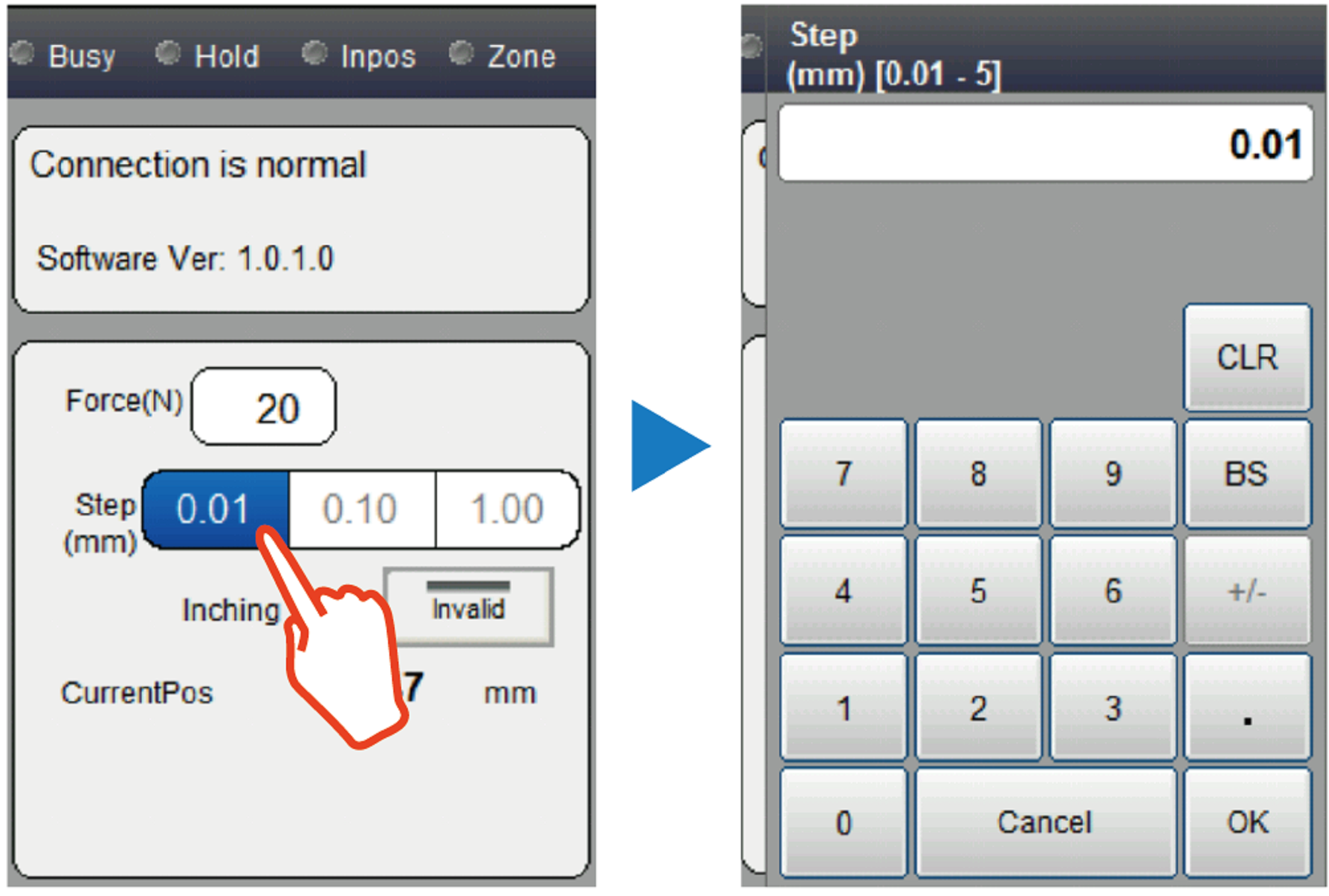
| Distance (mm) | Set the inching distance when the inching mode is enabled. The unit is [mm]. To edit the inching distance, use the numeric keypad that displays when you press the selected key to set the value. The setting range is from 0.01 mm to 5.00 mm.
|
(*1) Only the Force (N) setting value is retained even if the power is turned OFF and ON.
(3) Point Data Display
Point data to be used for the HandUnChuck and HandChuck, which are gripper motion commands, can be set.
For the content of point data, refer to the "HandUnChuck" and "HandChuck" commands.
The [Unchuck] and [Chuck] buttons are used to check the operation of point data that has been set.
To perform an operation with the [Unchuck] and [Chuck] buttons, press the Motion allow button at the same time. Releasing the button will stop the operation.
F1: Get Position
Obtains current information of point data.
| Mode | Gripper operating mode.The mode to be set is automatically determined according to the gripper operating status just before the Get Position button is pressed.
|
|---|---|
| Moving distance (mm) | The current finger positions of the gripper are set.The unit is [mm]. |
| Speed (%) | Gripper operating speed.All set to 100%.The unit is (%). |
| Force (N) | Sets the holding force of the manual operation.The unit is [N]. |
Pressing the Get Position button will import all the information including moving distances, speeds, and gripping forces regardless of the operating mode type.
F4: Jump To
Displays the data at the specified point number on the point screen.
F5: Edit
Edits an item where the cursor is placed on the point screen.
F6: Copy
Copies the content of a point currently selected.
F7: Paste
Pastes the content copied with F6 to a selected point.
ID : 7160