
ID : 7195
Interlock between Robot Position Teaching and Point Data Teaching
Perform the following procedure:
Interlock procedure
1
On Remote TP or Virtual TP, use the following operation path to open the variable screen.
Operation path: Top window - [F3 Variable]
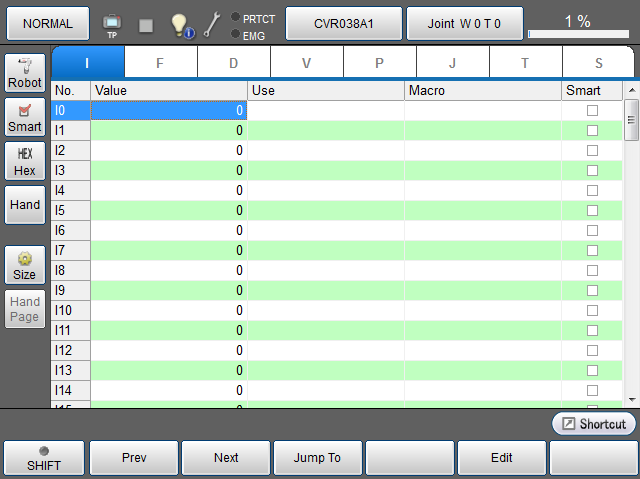
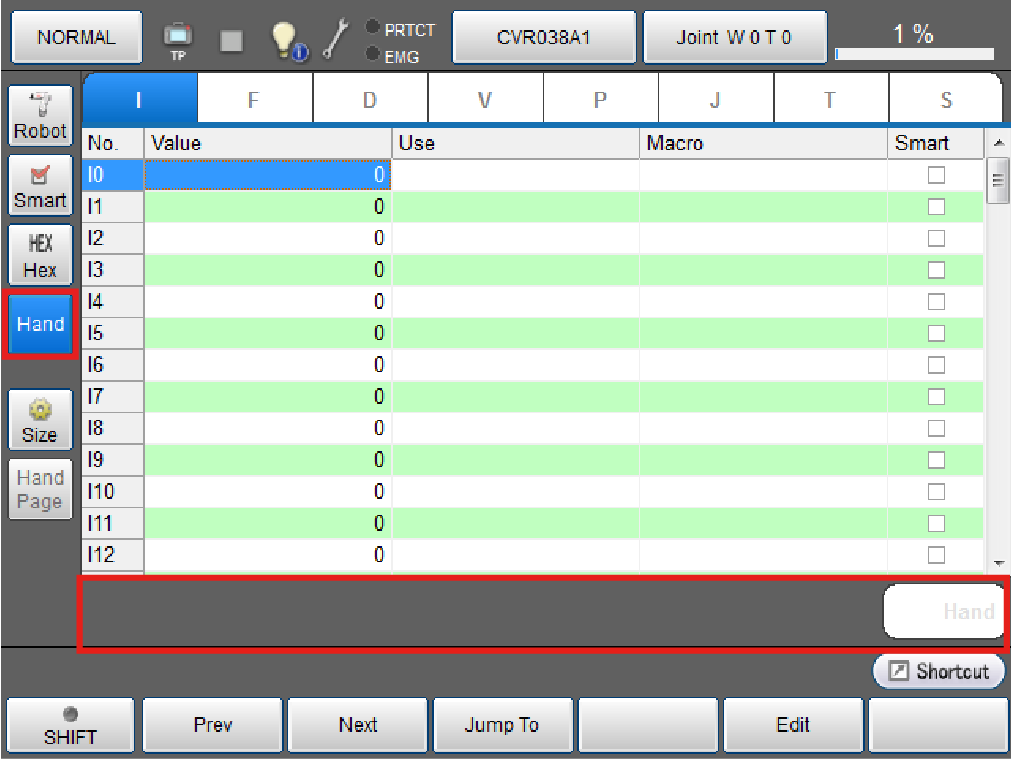
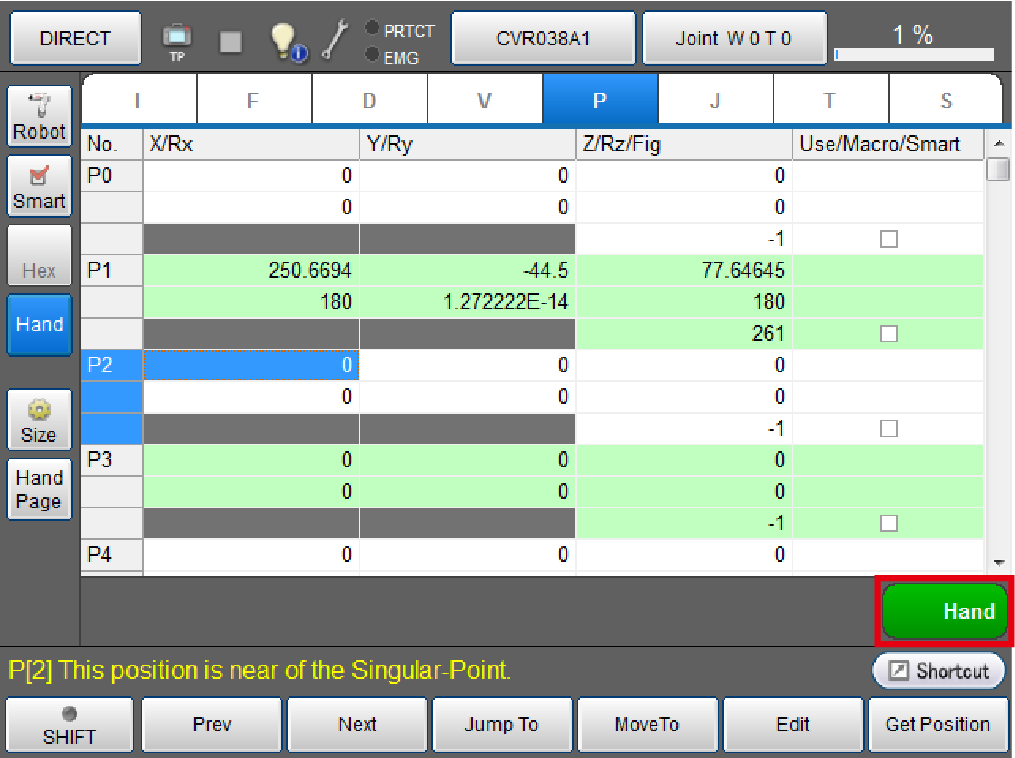
When the gripper is enabled, the [Hand] button is displayed on the left side of the variable screen.
Press the [Hand] button to obtain the point data of the gripper.
The [Hand] button for interlock with the gripper is displayed on the lower part of the screen.
2
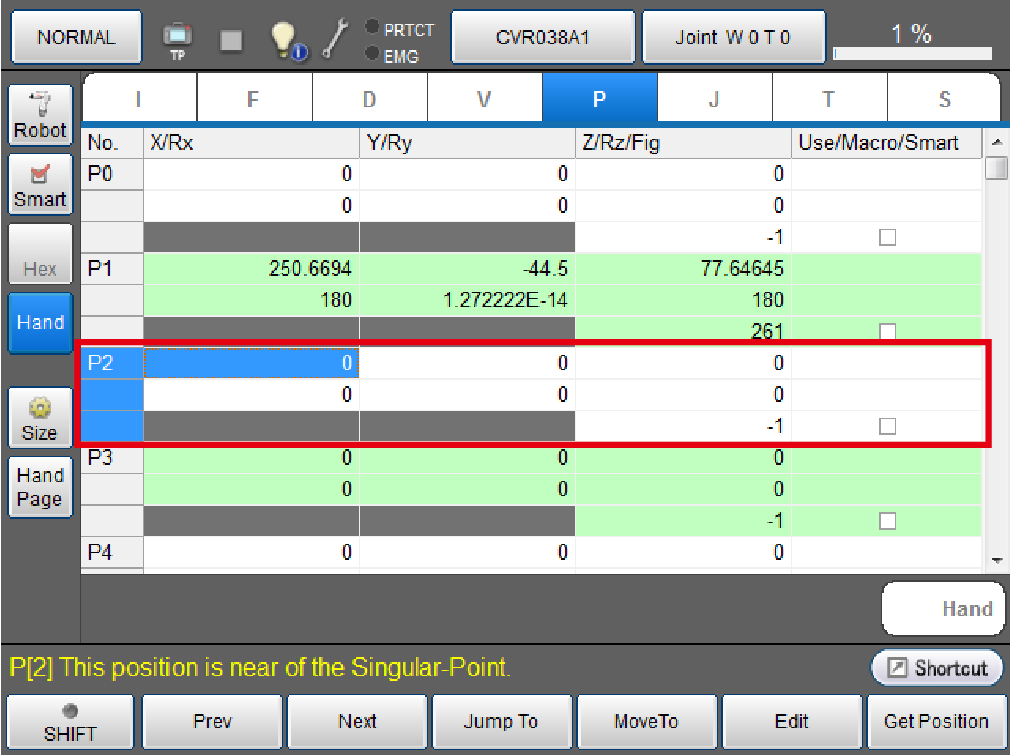
Select the tab of a variable used to teach the robot position and select a variable number.
A position can be taught in P-type, J-type, or T-type variable.
Press the data part of a variable number to select and display it in blue.
For details about the operation, refer to "Displaying and Changing Variable Screen" in the TP App Operation Guide.
3
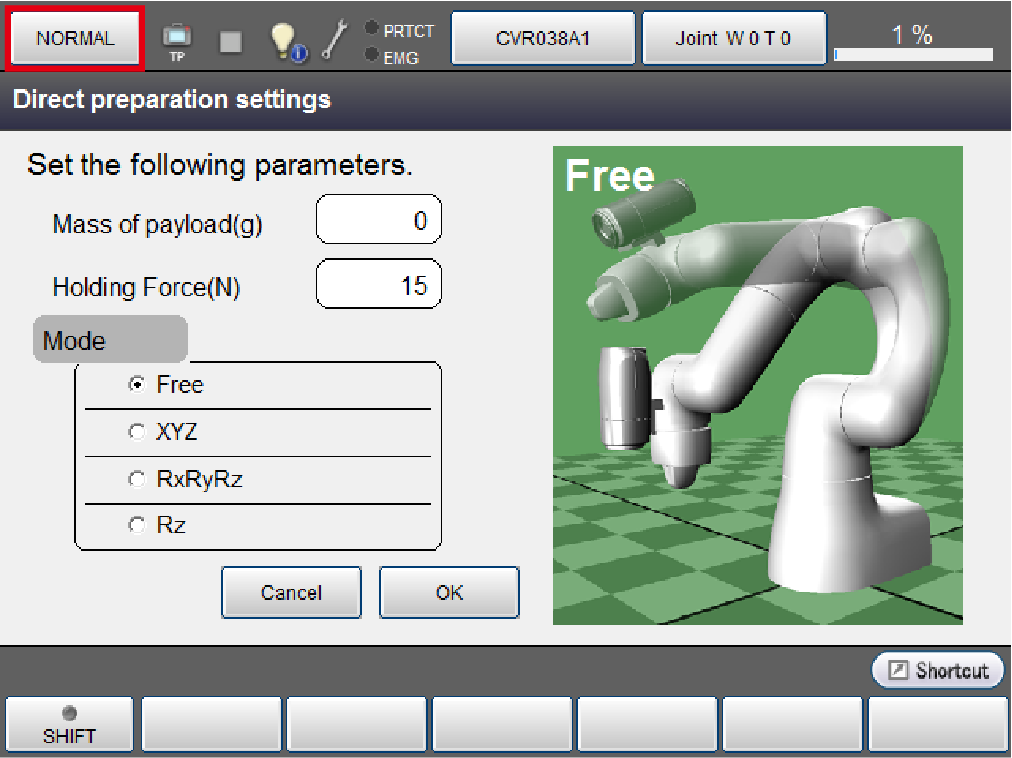
Press the button that displays [NORMAL].
When the direct mode setting window opens, configure the items and press the [OK] button.
For details about the operation in direct mode, refer to "Direct Teaching" in the TP App Operation Guide.
4
Manually move the COBOTTA unit to a position and posture to be taught.
5
Press the "Hand" button to set the gripper point at this position and posture.
If the button is displayed in green, the interlock state is set.
6
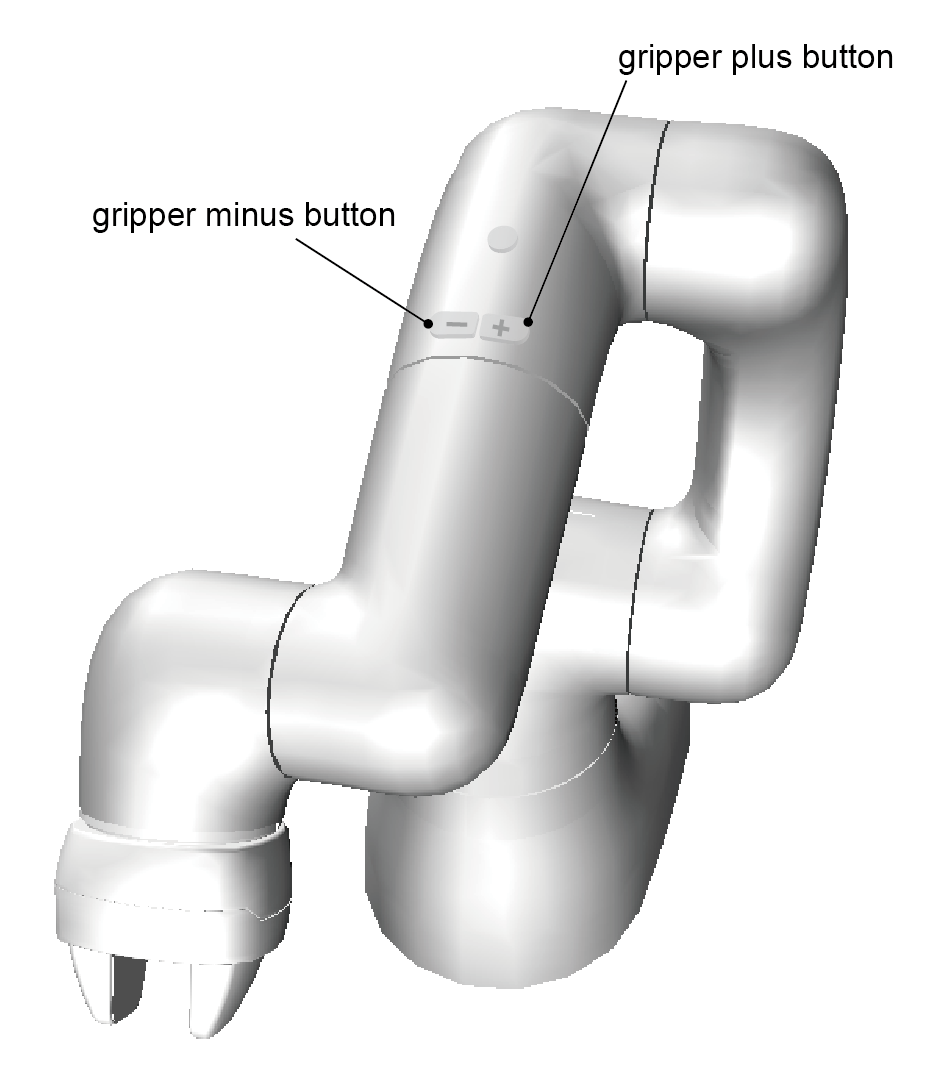
Press the gripper open and close switches on the COBOTTA arm to adjust the finger positions.
The fingers can be moved while the gripper open and close switches are pressed.
When using the gripper open and close switches on the arm, it needs to be set by the "COBOTTA parameter tool".
For details, refer to "COBOTTA Parameter Tool Guide".
The gripper mode is automatically set according to this movement when the position is obtained later.
Teach the workpiece gripping using an actual workpiece.
| Operation | Gripper mode at position obtaining |
|---|---|
| Close the gripper to grip a workpiece. | Constant-Speed Movement and Grip (CLOSE) Mode. Used by the HandChuck command. |
| Open the gripper to grip a workpiece. | Constant-Speed Movement and Grip (OPEN) Mode. Used by the HandChuck command. |
Open or close the gripper but do not grip a workpiece. |
Absolute position movement mode. The current finger positions are obtained. Used by the HandUnChuck command. |
7
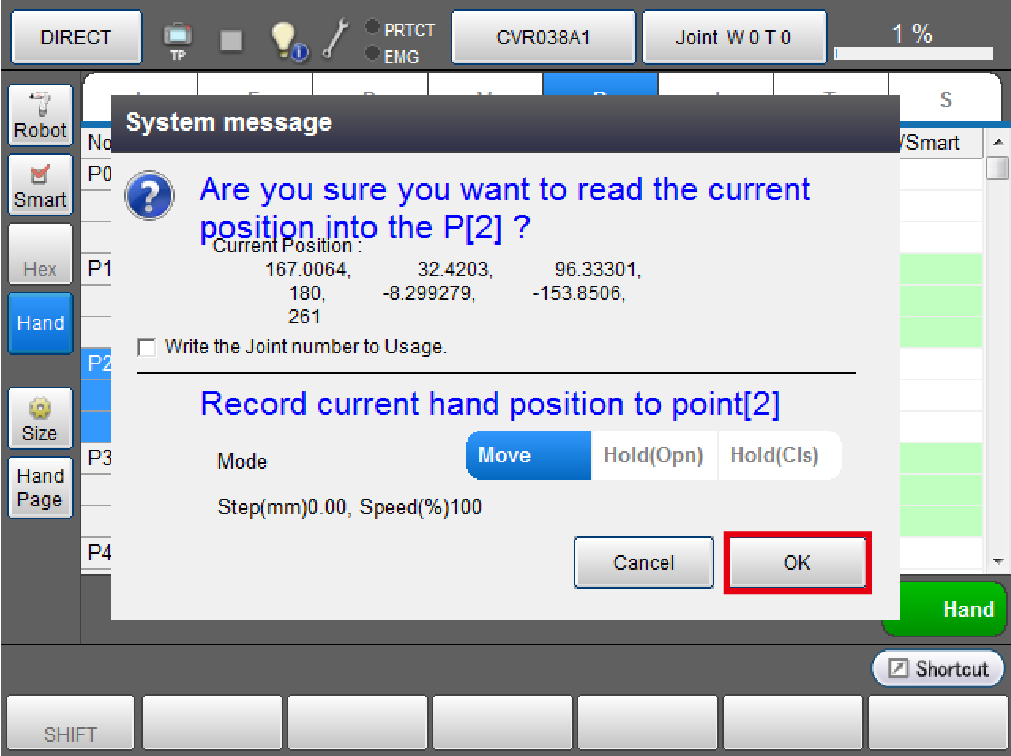
After completing specifying the gripper motion, either press the function button on the COBOTTA arm or [F6 Get Position] button in the variable screen.
The robot position information and point data are obtained.At this time, the variable number and the point number are the same.
The gripper information to be obtained includes the mode, moving distance, speed, and gripping force.This mode is automatically set according to the gripper motion in Step 6.
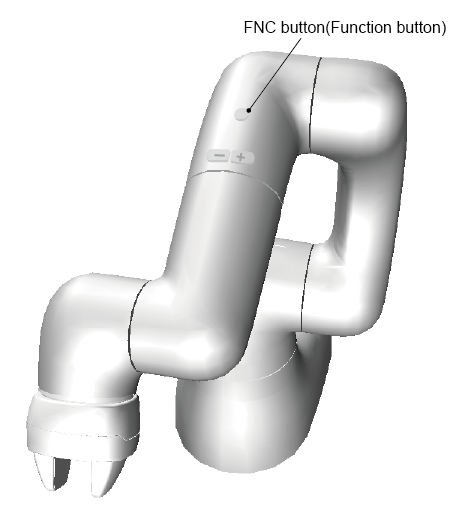
Press the function button on the COBOTTA arm to immediately obtain the robot position information and gripper's point data.
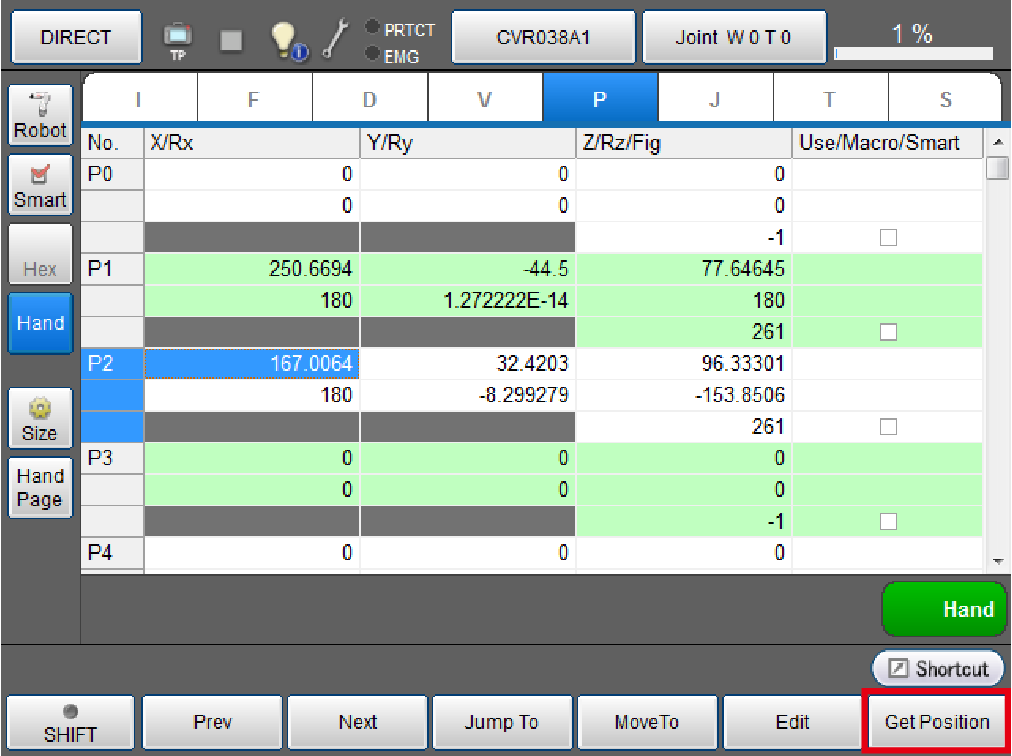
Press the [F6 Get Position] button in the variable screen to open a new window that displays the robot position information in the upper part and the gripper point data information in the lower part.
Press the [OK] button to immediately obtain the robot position information and gripper point data.
8
Likewise, teach other robot positions and gripper point data using the procedure in Steps 3 to 7.
To select not to obtain the point data, press the [Hand] button in Step 4 to disable interlock, skip Steps 5 and 6, and press [F6 Get Position] of the robot in Step 7.
Press the [Hand] button in the interlock disabled state to set interlock and press it in the interlock state to disable interlock.
9
To change the gripper mode, press the [Hand Page] button.
When the hand page opens, select a point number to change the mode.
For details on the operation in the hand page, refer to "Use of Hand Page."
Perform this operation as needed.
Checking Procedure
The obtained point data can be checked in accordance with checking of the robot position data.
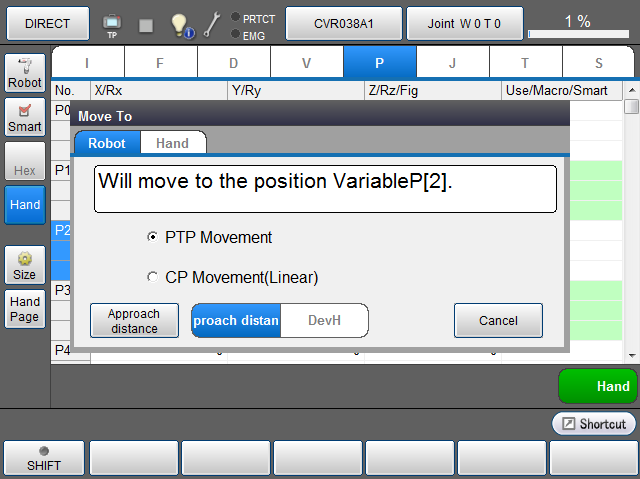
Specify a variable in the variable screen, press the [Hand] button to set the interlock state, and press [F4 MoveTo].
The Robot and Hand tabs appear in the screen below.
(The variable No. and the gripper variable No. are interlocked.)
Moving in the variables moves the robot. When it is completed, moving in the gripper variable starts.
ID : 7195