
ID : 7271
Manual Operation of Arm
The arm can be moved using key operation of Remote TP/Virtual TP.
Follow the procedure described below to move the arm.
Operation Procedures
Before moving the robot manually, make sure to check the following items.
- The robot is installed properly.
- There is nobody in the robot motion space.
1
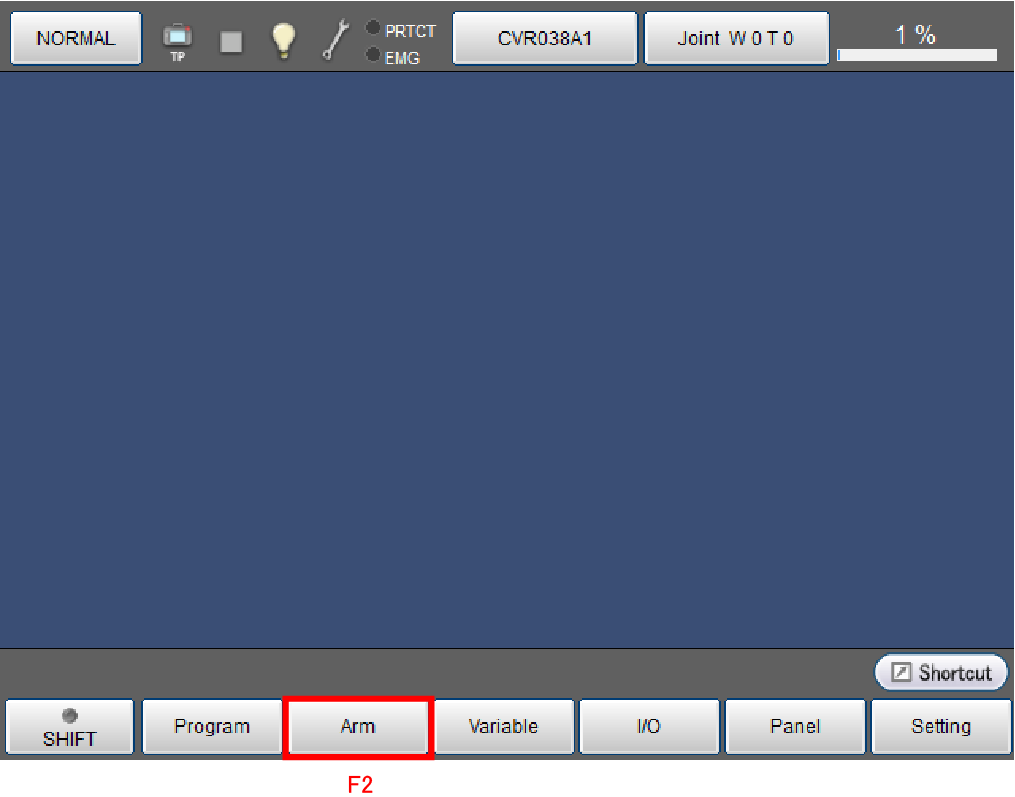
Press [F2 Arm] in the initial screen.
Each arm of the robot can be operated without current position displayed.
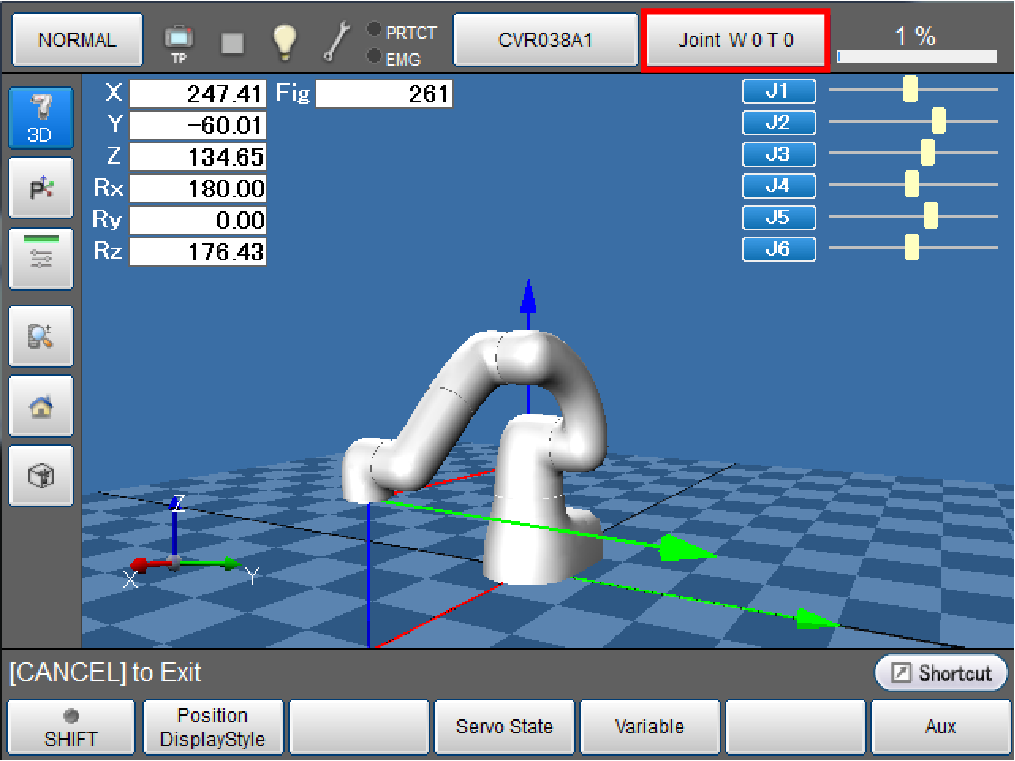
2
"Joint mode" is selected by default in the operating mode for manual operation. If another mode is desired, switch the operating mode. Refer to "Mode Change in the Manual Operation" for the operation procedure.
3
Set the speed and acceleration.
At the default setting, the speed is set to 1%.
Refer to "External Speed Settings" for the operation procedure.
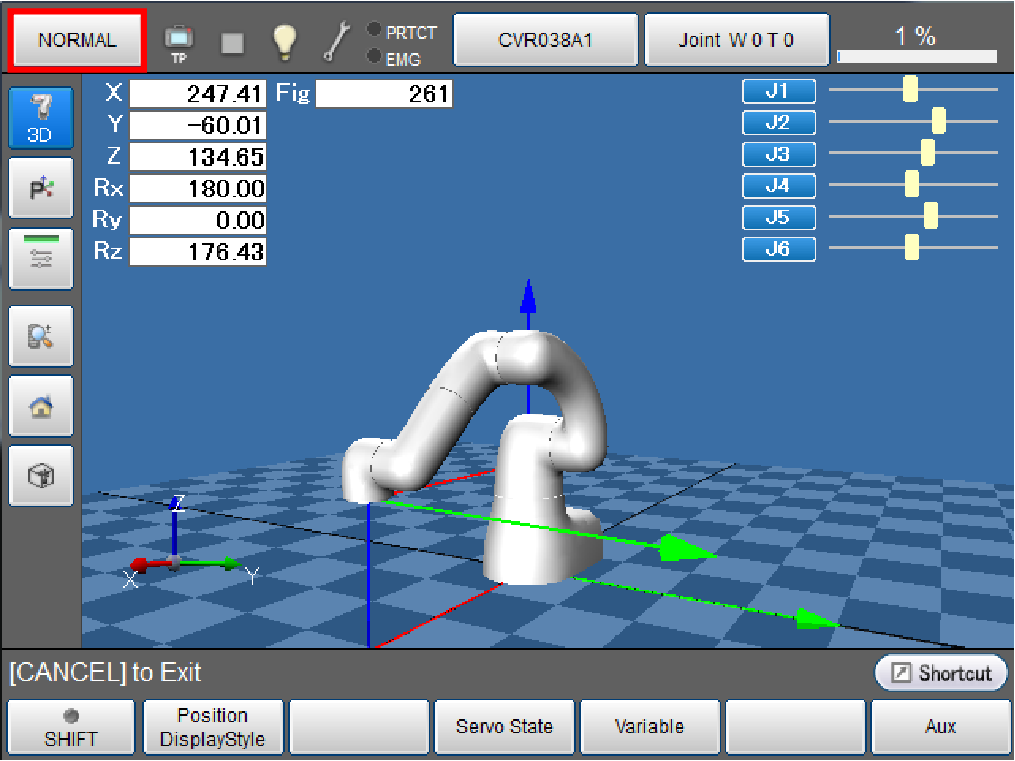
4
Check that the operation mode is Normal mode.
Note that you cannot operate the robot with motion direction keys if the operation mode is direct mode or direct preparation mode. Switch to the normal mode. For about how to switch the operation mode, refer to "Switching Between Operation Modes".
5
The robot moves when performing this operation. Operators must exit the robot motion space.
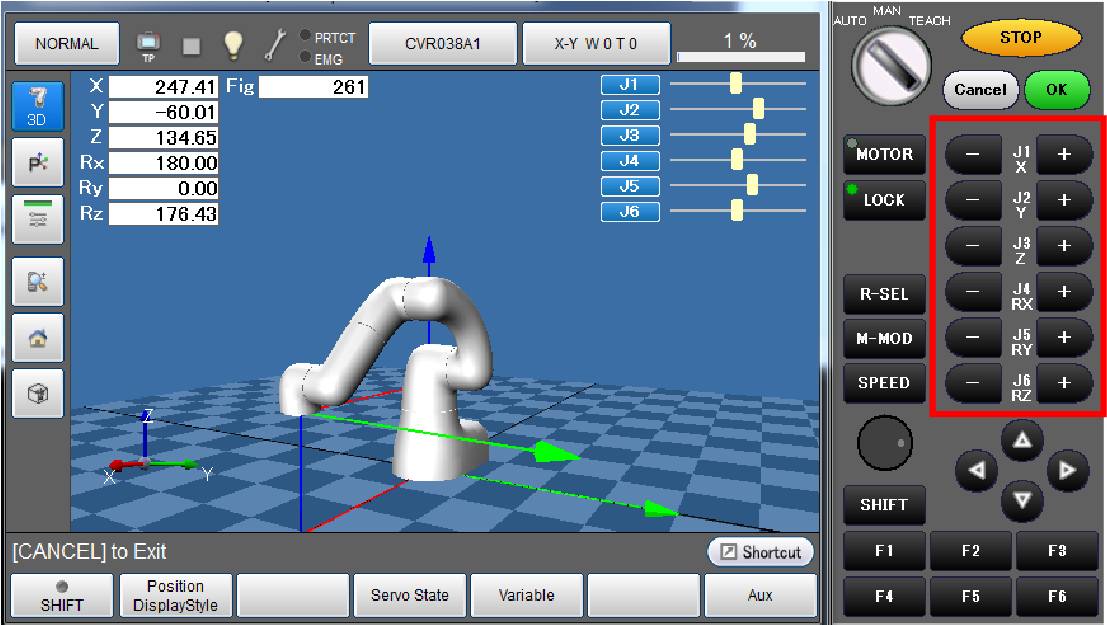
The motor power is turned ON and the arm moves while pressing motion direction keys ("+" and "-") of Remote TP/Virtual TP. When the motion direction keys are released, the arm movement is stopped, and the motor power is turned OFF.
The current position displayed on the screen is changed according to the arm movement.
The role of the motion direction keys varies for each operating mode. Refer to "Top Window and Icon" for details.
The following screen shows an example of operation in the X-Y mode.
ID : 7271