
ID : 4042
Mode Change in Manual Operation
The following three types of operating modes are available to move the arm using Remote TP/Virtual TP key operation: joint mode, X-Y mode, and TOOL mode.
Refer to "Manual Operation" of Function Guide for details of each mode.
Follow the procedure below to switch the mode.
Procedure to Switch Mode
When starting operation, set the speed to 20% or less to operate the robot. Operating the robot at high speed from the beginning involves the risk of accidental collision with surrounding equipment.
1
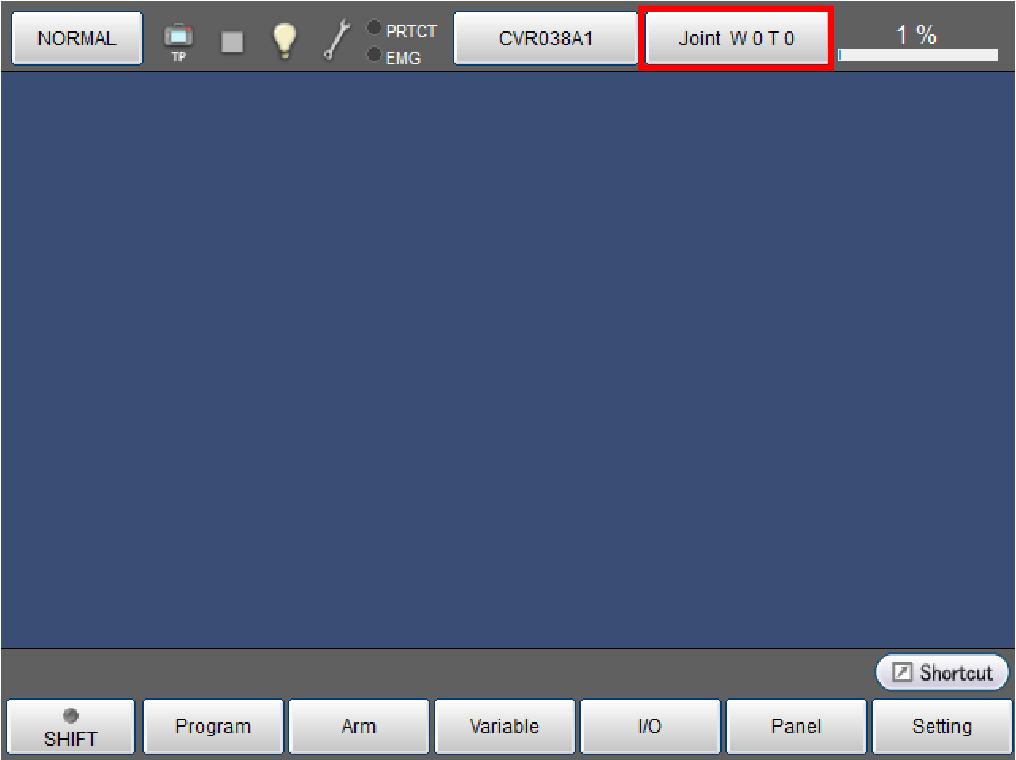
Press the mode display on the status bar.
The [Choose MoveMode] window will be displayed as shown in the following step.
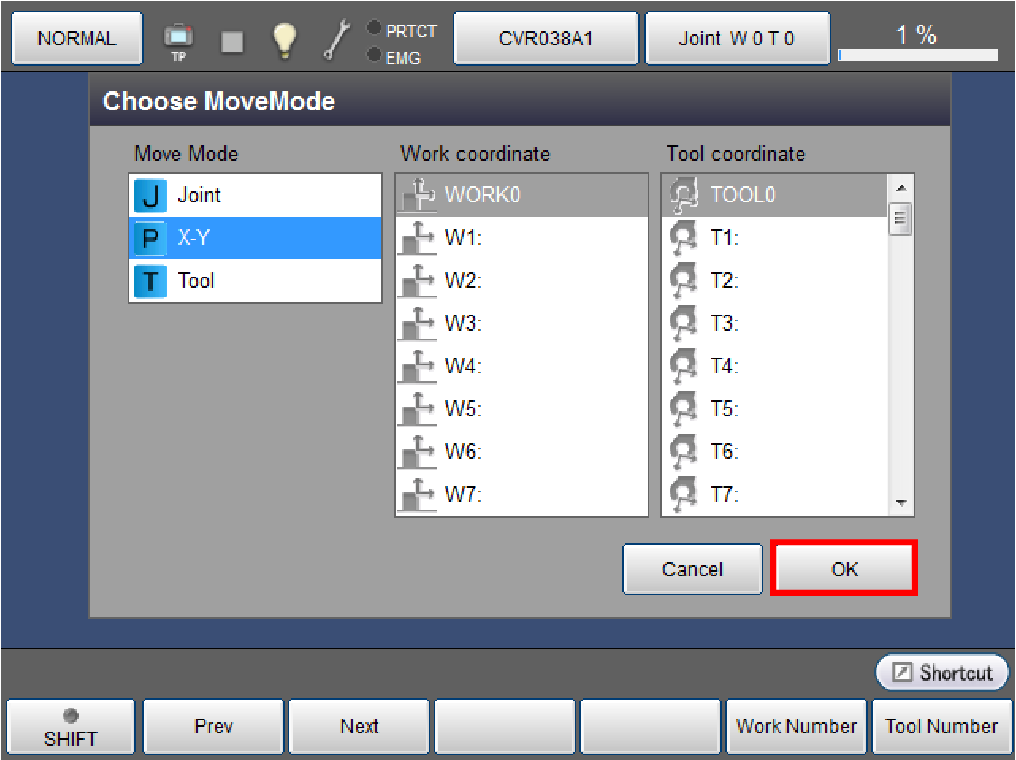
2
Select the mode using cursor keys or directly touching the screen. Press [OK].
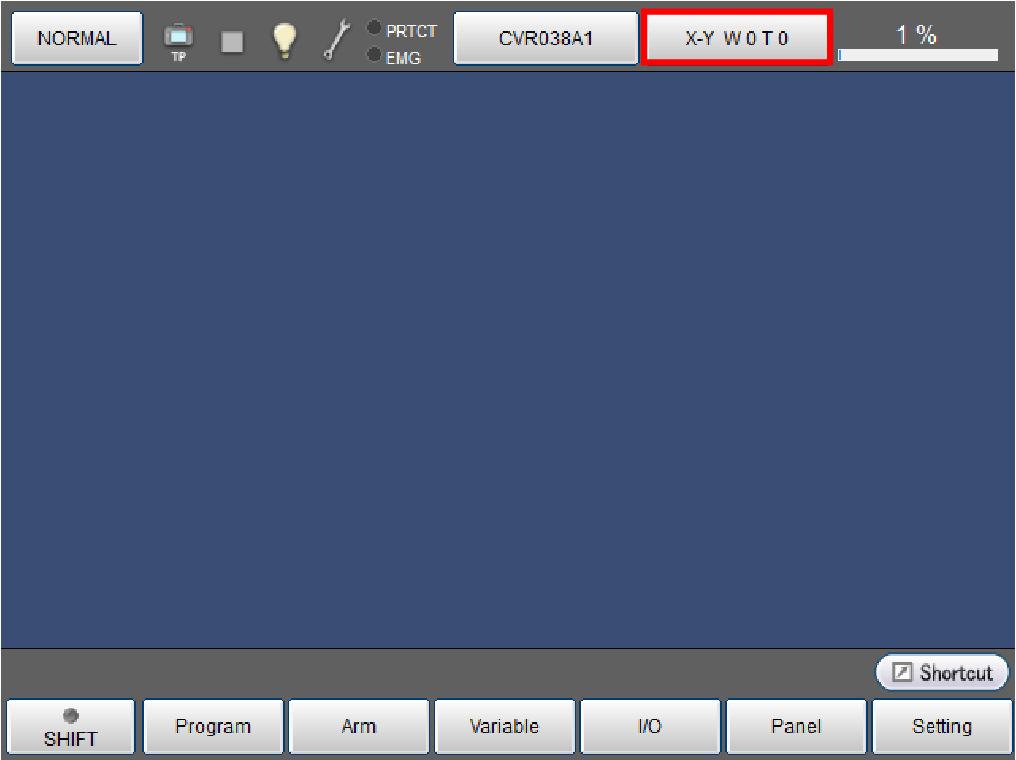
3
The selected operating mode will be displayed on the mode display on the status bar.
ID : 4042