
ID : 7955
Motion Preparation Completed (Output)
Function
This command outputs the state where a COBOTTA robot program can start.
Usage
This signal is used to check if a robot program is executable state.
When this signal is OFF, you cannot start a robot program. Use "Mode switching" of I/O Command or some other method to perform the motion preparation. For how to perform the motion preparation, refer to "Motion Preparation".
ON conditions
The signal is turned ON when COBOTTA is in the motion preparation status after you perform "Mode switching" of I/O Command or the instructions described in "Motion Preparation".
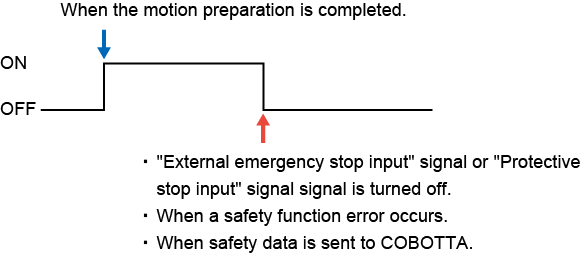
OFF conditions
- "External emergency stop input" signal or "Protective stop input" signal signal is turned off.
- When a safety function error occurs
- When safety data is sent to COBOTTA
Timing Chart
ID : 7955