
ID : 7280
Motion Preparation
To start the COBOTTA motion from the following state, you need to perform a certain operation, called "Motion preparation".
- Startup of COBOTTA
- Safety-related error state (red LED) is released
- When the emergency stop input signal or the protective stop input signal was released once and then a short circuit occurred
- Safety data is transferred to COBOTTA
Motor-on, program-run (robot command execution), direct operation and brake release are not allowed unless the motion preparation is completed.
Operating Procedure
Following three methods are available:
When safety data was sent to COBOTTA by using COBOTTA parameter tool, parameters need to be checked on the [Motion Preparation] window of TP App.
Until the parameters are checked on TP App, the motion preparation cannot be performed by I/O Command or a robot program.
The following part explains each method.
Operation from Application Program
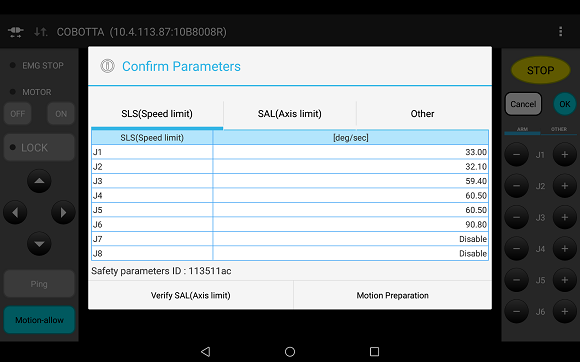
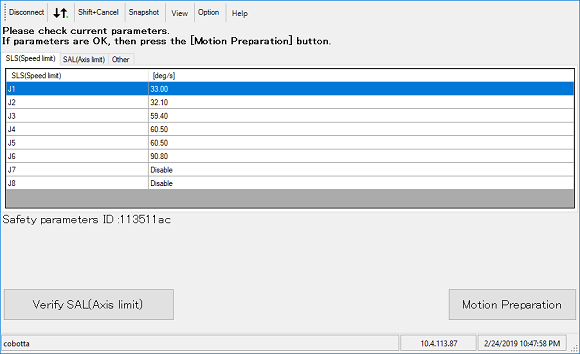
If you operate COBOTTA with Remote TP or Virtual TP, when the motion preparation is required, the following window appears.
When all parameters are confirmed, the [Motion Preparation] button will be enabled. Press the [Motion Preparation] button. When the following screen disappears, the motion preparation has been completed.
Under some conditions, an error may occur repeatedly after performing the motion preparation. For the handling of this case, refer to "When Error Occurs Repeatedly after Motion Preparation".
- Remote TP
- Virtual TP
Safety Parameters ID
Safety parameter ID is a specific value that changes depending on the parameter setting values.
This is used to check the scene of the safety parameter stored in COBOTTA.
For details, refer to "Manage Per Scene".
Operation from I/O Command
Execute an I/O command.
I/O commands to execute differ depending on whether if "Field Network Interface Module" is used.
Operation without Field Network Interface Module
For about how to use an I/O command, refer to Command Execution I/O Signals.
| Allocation mode | Command area | Data area |
|---|---|---|
| Mini I/O dedicated | 000 Operation preparation | 001 Motor ON 010 External speed100 (SP100) 100 Motion preparation 111 All of above (Motion preparation→Motor-ON→SP100) |
If there are two or more inputs, the operation will be done in order of [Motion preparation]→[Motor-ON]→[SP100].
Operation with Field Network Interface Module
For details, refer to "List of I/O Commands".
| Allocation mode | Command area | Data area |
|---|---|---|
| Standard | 0111 Mode switching |
00000001 Motor ON 00000010 External speed100 (SP100) 00000100 Motion preparation 00000111 All of above (Motion preparation→Motor-ON→SP100) |
Operation from a Robot Program
Use the following PacScript commands. For details of each command, refer to the following reference.
| Command (Reference) |
Functions |
|---|---|
| MotionPreparation | The motion preparation is performed automatically. |
| GetMotionPreparationState | The motion preparation completion status is acquired. |
ID : 7280
- Related Information
- If Error Occurs Repeatedly after Motion Preparation