
ID : 1607
Execution Time Difference among Pass Motion, End Motion and Encoder Value Check Motion
Among the three motions, the pass motion has the shortest execution time, followed by the end motion and finally the encoder check motion.
The pass motion starts the next acceleration motion during deceleration time before it reaches P2 as shown below. Therefore, the execution time is shorter than the end motion, which executes deceleration and acceleration individually.
In the encoder value check motion, because the robot strictly checks reach of the destination position with the encoder value, it requires more time to eliminate servo deviation than the end motion does.
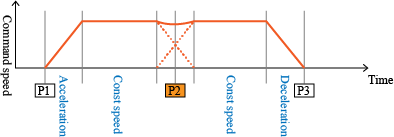 |
The pass motion is fastest because it overlaps deceleration and acceleration at P2. |
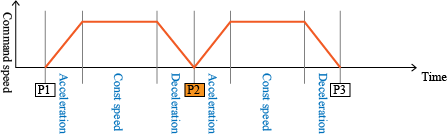 |
The end motion executes deceleration and acceleration individually at P2. |
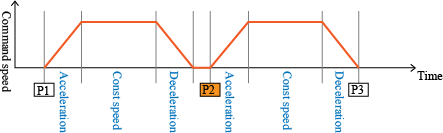 |
The encoder value check motion takes longer time than the end motion, because it executes deceleration and position check at P2 and P3. |
ID : 1607