
ID : 1955
Precausion of Figures
When carrying out a command with CP control, if the robot figures at the start point differ from those saved in programming or teaching, be sure to check beforehand that no part of the robot will interfere with the surrounding equipment or facilities. This is because each joint of the robot will take currently suitable motions depending upon the current figures to make the tip of the end-effector reach an object point even if the robot position and attitude at the start point are the same as those in programming or teaching. However, the path of the end-effector is virtually the same although the figures may be different.
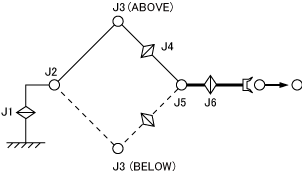 |
All of the different figures may not be applicable to every position and attitude of the robot due to the robot structure. In some cases, only the LEFTY/ABOVE/NONFLIP figure may be applicable depending upon point and attitude. (In almost of all practical cases, the robot may not take all of the logically possible figures, but only two figures are possible--LEFTY/ABOVE/NONFLIP and LEFTY/ABOVE/FLIP. For the 4th-axis figure, the robot will take SINGLE 4.)
ID : 1955