
ID : 1956
Boundaries of Robot Figures
This section describes the boundary of each of the robot shoulder, elbow, wrist, and 6th-axis figures.
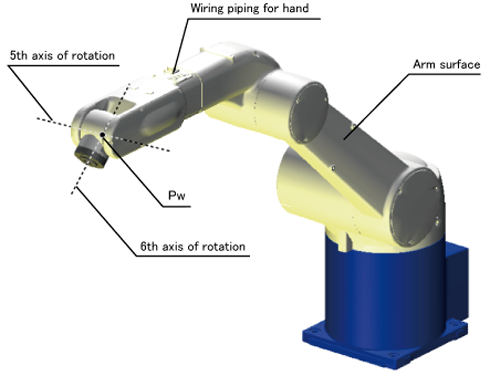
When judging the boundaries of the robot shoulder, elbow, and wrist, the system uses intersection point Pw of the two rotary axes of the 5th and 6th axes.
 |
A boundary point in figures is called a singular point.
Any path defined by commands with CP control (e.g., MOVE, APPROACH, and DEPART) should not run through the vicinity of the singular point. " If the path runs through the vicinity of the singular point, the robot will issue 84204060 (Overspeed) or 83204070 (Over software motion limit) and then stop.
ID : 1956