
ID : 2160
Check Points When an Encoder Data Error Occurs
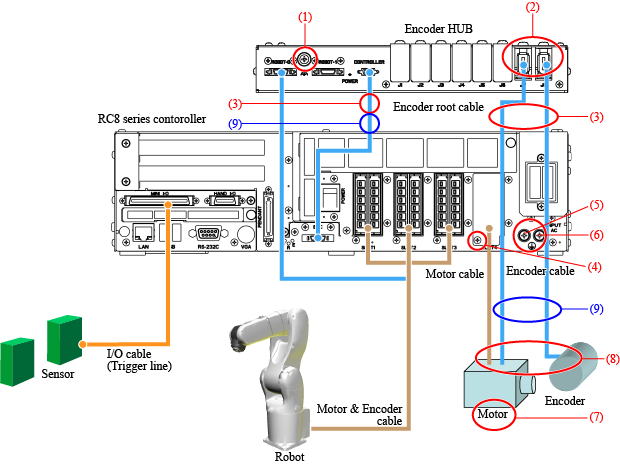
The most common causes of encoder errors are noise and wiring problems.
Check each point indicated by numbers in the figure below. These numbers correspond with the ones that are written in each table of the following Noise section and Wiring Problems section.
Noise
Perform the following measures and then check if the encoder error is cleared.
| No. | Measure |
|---|---|
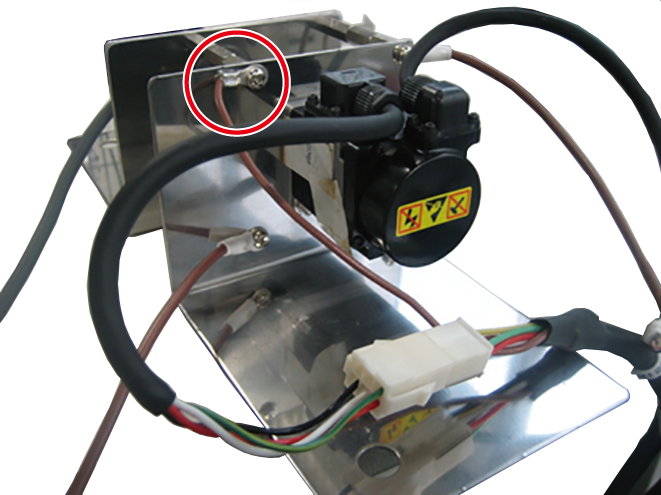
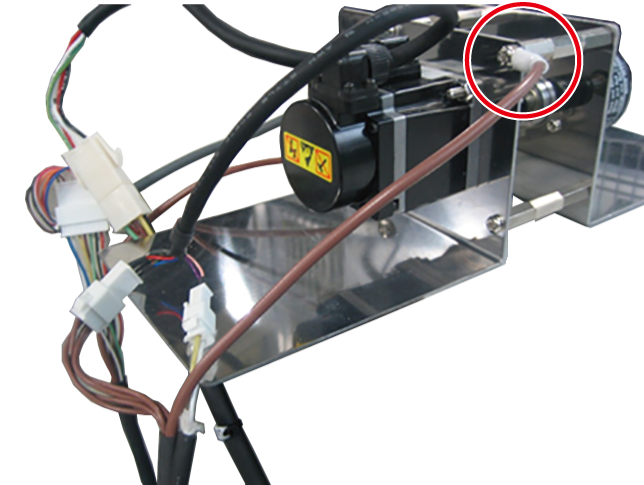
| (1) | Ground the earth terminal of front metal panel of a encoder hub. |
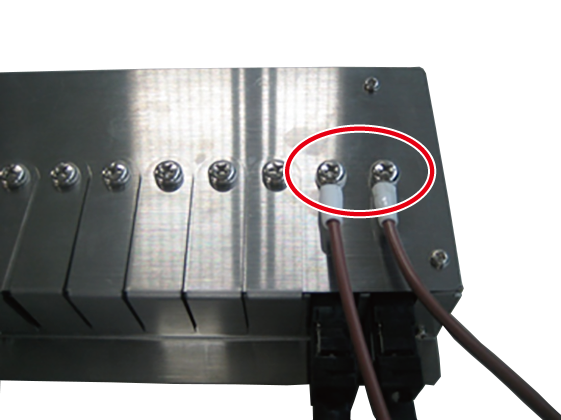
| (2) |
As the figure shows, connect FG lines of an encoder cable.
|
| (3) | Do not bundle the encoder cable and/or encoder root cable with other power lines. |
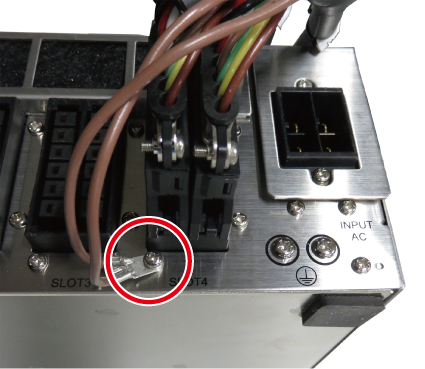
| (4) |
Connect an FG line of a Motor cable to the controller, as shown below.
|
| (5) |
Connect an FG line of a Motor & Encoder cable, as shown below.
|
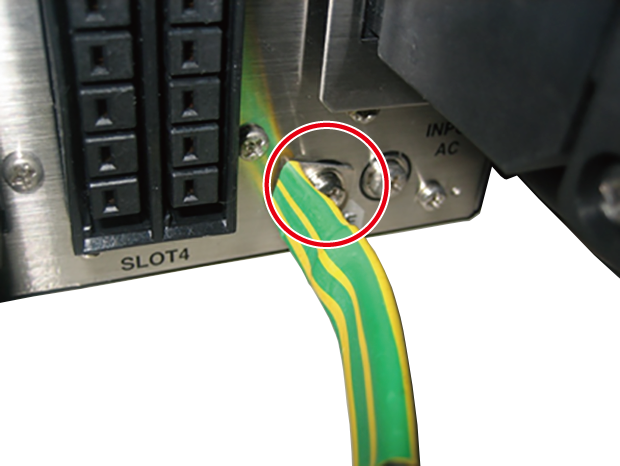
| (6) | Ground the earth terminal of front metal panel of a controller. |
| (7) | Connect a motor flange in a FG of facilities (for example, sheet metal). |
| (8) |
Connect FG lines of an encoder cable and a motor cable to facilities FGs, as shown below.
|
Wiring Problems
Check the following points. You may required to replace a cable or wire if any problem is expected.
| No. | Measure |
|---|---|
| (9) | Check if an encoder data error happens when moving or striking a cable. |
Precautions on Using Cableveyor
If you move a robot with a motor cable and/or encoder cable being installed in the cableveyor, fix the connector joint parts to prevent damages on these cables. When fixing connector joint, be careful not to disturb the cableveyor's motion.
ID : 2160