
ID : 2491
Monitoring of I/O and Hardware Status
Hardware and I/O status can be monitored with a teach pendant or WINCAPSIII.
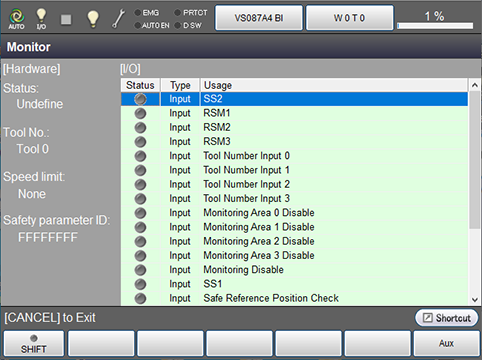
Teach Pendant
Operation path : [F2 Arm] - [F12 Maintenance] - [F5 Safety Motion] - [F1 Monitor]
| Item | Content | |
|---|---|---|
| [Hardware] | Status: |
|
| Tool No.: |
|
|
| Speed limit: | SS2 input (0 mm/sec.), Display the lowest speed among RSM1 to RSM3.
Under the manual mode, the monitoring speed limit will be 250 mm/second regardless of the monitoring speed displayed. |
|
| Safety parameter ID |
Safety parameter ID is a specific value that changes depending on the safety parameter setting values. It is used to check for a change made for some reason in safety parameters sent to a robot controller. Below is an example of how to use it.
Safety parameter ID helps you check for a change in safety parameters without checking each setting value of the parameters. Safety parameter ID is displayed when the robot controller's software version is 2.15.* or higher. |
|
| [I/O] | Display the ON/OFF-state of each I/O. It turns green when the I/O is ON-state. | |
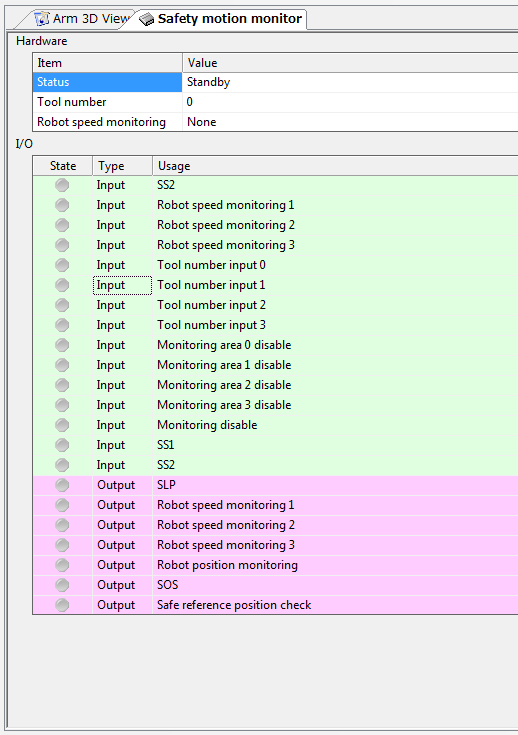
WINCAPSIII
Operation path : Menu [View] - [Safety motion monitor]
| Item | Content | |
|---|---|---|
| Hardware | Status |
|
| Tool number |
|
|
| Robot speed monitoring | SS2 input (0 mm/sec.), Display the lowest speed among RSM1 to RSM3.
Under the manual mode, the monitoring speed limit will be 250 mm/second regardless of the monitoring speed displayed. |
|
| I/O | Display the ON/OFF-state of each I/O. It turns green when the I/O is ON-state. | |
ID : 2491