
ID : 2785
Reference Position Registration Procedure
1
With WINCAPSIII, open a project of a robot that you intend to register the reference position.
2
From the menu bar, select the following.
[Tool]-[Simple position correction]
3
Connect to the robot controller.
4
Once the Simple position correction dialog window appears, select [Register the reference position].
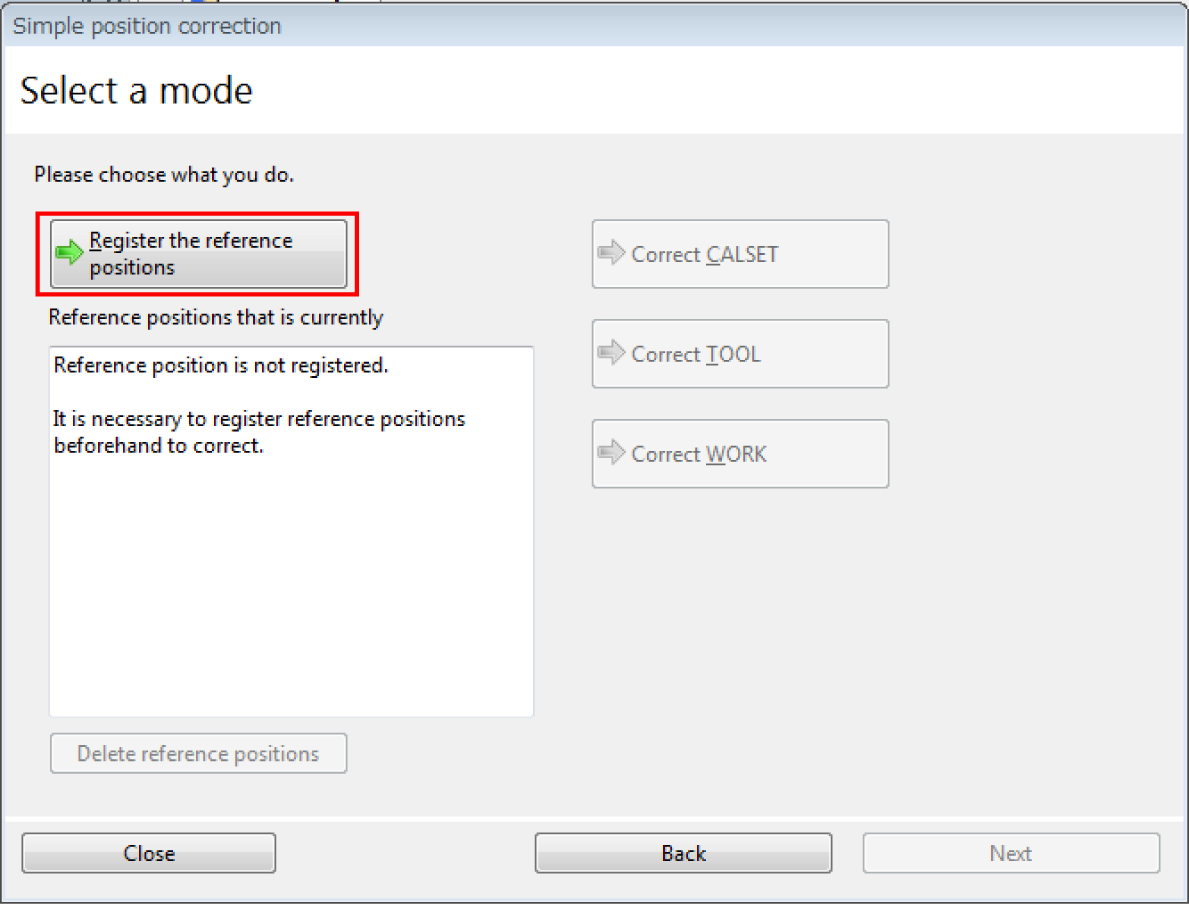
When the system message "Prepare to register reference position" is displayed, check if the reference positions and tool meet the listed conditions, and then click [OK].
5
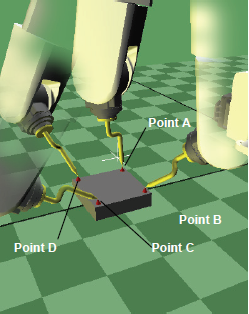
Once you teach the reference position that you have just created to the robot, and then click [Add], the current robot position will be registered in the reference position data.
Select the registered reference position data, and then click [Update] to overwrite the current robot position.
To delete a reference position data registered, select a reference position and then click [Delete].
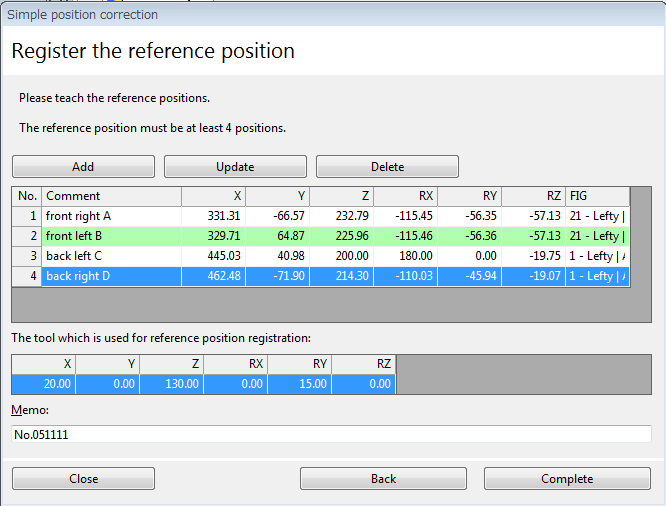
The more you register reference positions, the higher the correction accuracy will be.
To make the correction more accurately, when you teach reference positions to the robot, select the reference positions so that all axes can move at the positions.
It is recommended to write the registered position's name in the text box (comment or memo) to distinguish each position data.
6
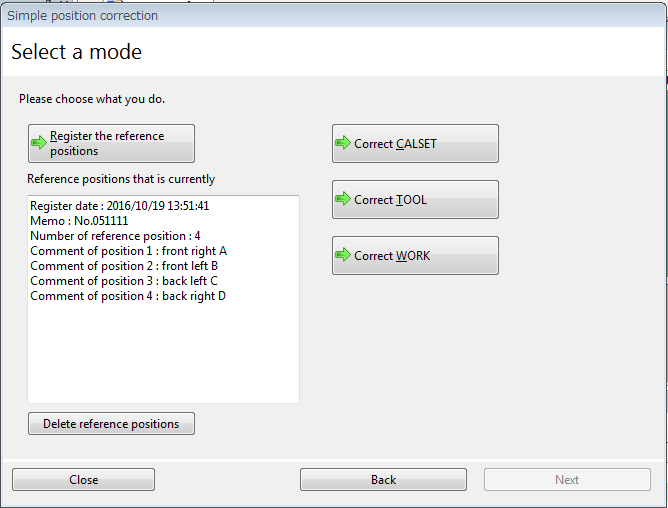
Once all reference positions are registered, click [Complete].
Brief explanation of the registered reference position data will be displayed. Check the content and close the window.
Registered reference position data is saved in the WINCAPSIII project. Be sure to save the project before you close it.
ID : 2785